

随着摄像头成本和尺寸的不断下降以及图像处理软件功能的不断增强,机器人系统在新型视觉引导应用中大量出现,尤其是3D应用。AspenCore视觉引导机器人专题通过一系列文章探讨了围绕该技术的硬件、软件和商业问题。
机器人能够快速准确地抓取和操纵物体,这种能力使其非常适于执行重复、危险或繁琐的任务,例如零件检查,以及在雾、火、水下作业或焊接等操作。作为收集和分析信息的传感器,摄像头对于机器人在地面上行走导航并避免其与附近物体碰撞十分重要。不同类型的摄像技术包括:2D成像、3D感应、超声和红外等。
机器人视觉摄像头的技术类型
2D成像技术
对于具有机器视觉,但不需要深度或距离信息的机器人,普通2D数码摄像头是比较通用的选择。数码摄像头尽管看起来像胶片相机,实际上它基于完全不同的科学原理。它与电视也不同,电视投射出数百万个微小的彩色光点或像素以合成图像,而数码摄像头则捕获从物体反射回来的光粒子(光子),并将其转换成可作为数字存储起来的电信号,或叫像素。一张数码照片实际上是一长串描述每个像素的数字。在屏幕上,这一长串数字又被转换为像素并合成图像。
2D数码摄像头有两种类型,即电荷耦合器件(CCD),以及互补金属氧化物半导体(CMOS)。相比CMOS摄像头,CCD摄像头分辨率更高且噪声更低,但价格更高且能效较低。本文将提供选择2D摄像头的绝佳指南。另外,2D摄像头也在不断创新中,不断增加新的功能。例如,Pinnacle的高动态范围(HDR)成像技术能够帮助2D摄像头捕获更佳的视频和图像。
 图1:上面的照片显示了两个具有不同动态范围的图像。右侧具有高动态范围性能的照片效果更佳。 (图片来源:Pinnacle Imaging Systems)
图1:上面的照片显示了两个具有不同动态范围的图像。右侧具有高动态范围性能的照片效果更佳。 (图片来源:Pinnacle Imaging Systems)优点:2D摄像头可有效地识别物体。它可以清晰地定义目标的边缘,并以高分辨率收集目标的许多细节。
缺点:2D摄像头对环境中的光照条件比较敏感。它会将镜像图像识别为第二个物体,而不是图像。最后,2D相机的图像捕获过程较慢,需要摄像头和物体相对静止。
对于需要获取3D信息的场景,使用超声、红外或3D感测技术的摄像头会更适合。
3D感应技术
3D感应是一种强大的机器人导航工具,它提供的信息包括体积、形状、位置、方向以及与物体的距离。3D数据可以通过不同的测量过程产生,如立体视觉、结构光和激光三角测量。立体视觉采用三角测量原理,使用来自一个位置的多个2D摄像头的图像,或来自不同位置的单个摄像头的图像,来计算深度。
结构光非常适合测量物体的3D形状,它使用投影光模式和2D摄像头系统进行测量。通过分析所观察到的条纹图案,可以收集有关物体深度的大量信息。
激光三角测量则使用2D摄像头和激光。激光投射到目标区域上,然后2D摄像头捕获反射的激光束。根据多张照片上的激光束弯曲程度就可以计算出物体的轮廓。但是,这种方法速度相对较慢,并且只能用于静止图像,这意味着必须中断某个进程才能进行数据收集。
优点:3D感测技术在近距离测量物体时具有很高的精确度,比超声和红外分辨率要高,并且在环境混乱时更加可靠。特别是在难以操控的表面或在环境光较暗的情况下,激光三角测量也可以工作,即使是低对比度的物体,它也可以提供精确的数据。
缺点:3D感测技术无法识别镜面或玻璃,因为它会将反射物识别为第二个物体。此外,它们对光线条件敏感,在环境过于单调且缺乏特性时表现不佳。此外,其感应速度很慢,只能用于感测静止图像,这意味着必须中断某个进程才能进行数据收集。最后,3D感测摄像头价格昂贵、体积庞大且较难校准。

超声波技术
超声摄像头也称为声纳摄像头,它通过测量声波的发射和接收之间的时间差来测量摄像头与物体之间的距离。超声摄像头还可以检测到附近的其它超声传感器、或其它带有超声传感器的机器人。
优点:相比其它类型的传感器,超声摄像头感测范围更长、更宽。它们不受光照条件(太亮或太暗)或空气颗粒(如灰尘、烟雾、薄雾、蒸气和绒毛)的影响。而且,它们不受对象的颜色、透明度、反射特性或表面纹理的阻碍。因此,超声摄像头非常适合测量液体高度和距离,检测物体时可避免在陆地或水下发生碰撞。
缺点:超声摄像头在定义目标边缘方面表现不佳。它在感测具有高密度和反射性表面的目标时效果很好,但不适用于泡沫或布料等低密度物体。超声摄像头还会受高噪音、温度、湿度和压力的影响。最后,它要求尽可能小的感测距离,但又不能检测距离太近的物体。
红外技术
红外传感器通过检测物体发出的红外线(IR)来工作。它还可以通过向物体投射红外光并接收反射光来计算目标物体的距离或接近程度。
优点:红外传感器可以检测大范围的红外光,它可以实时运行,极具成本效益。与超声传感器相比,它们在定义对象的边缘方面表现优良,并且易于识别不同的对象。例如,它们可以识别人和其它有热量的物体,并与其反射图像(例如镜子)区分开来。此外,红外摄像头能够在烟尘或雾气等低可见度条件下进行感测。像超声摄像头一样,IR相机可以检测水下材料,目前已经在建筑绝缘或泄漏检测中得到了应用。
缺点:红外传感器对红外光和阳光非常敏感,只能在弱光下使用。而且,红外传感器对不同材料的感测效果也不尽相同,因为不同材料对红外光的传递和折射均不同。
到底该选择哪种摄像头?
根据特性的不同,每种传感器类型都更适合某些任务,而不适合另一些任务。例如,超声传感器对坚硬对象感测效果好,但却不适于感测柔软的物体或有绒毛的物体。而且,它也不擅于将一个对象与另一个对象区分开。另一方面,尽管3D传感摄像头的精确性很高,但它却无法在黑暗条件或水下工作。因此,在开始选择摄像头之前,必须先了解清楚机器人的目标属性、工作条件,以及任务目标。
摄像头的安装是另一个要考虑的因素:将相机安装在机器人手臂的末端附近,可以更近距离地感测物体并获得更好的分辨率,但这也意味着摄像头将随着机器人一起移动,在捕获图像时,机器人必须停下来。但如果固定摄像头的位置,则将牺牲分辨率才能获取连续的成像。摄像头技术开发人员正在迅速整合各种先进的技术。例如,FLIR Systems的FLIR Firefly摄像头系列能够将摄像头和视觉处理单元(VPU)集成在一起,提供增强的人工智能功能。
 图2:FLIR Systems的FLIR Firefly相机系列集成了摄像头和Intel的Movidius Myriad 2视觉处理单元(VPU)。
图2:FLIR Systems的FLIR Firefly相机系列集成了摄像头和Intel的Movidius Myriad 2视觉处理单元(VPU)。现在市场上已经有无数的摄像头可用于视觉引导机器人,而且每天都有更多的摄像头出现。为帮助您进行选择,下面提供了一个流程图,它可以帮助您确定最适合需要的摄像头类型;还提供了一个有代表性的摄像头供应商列表,以方便搜索。
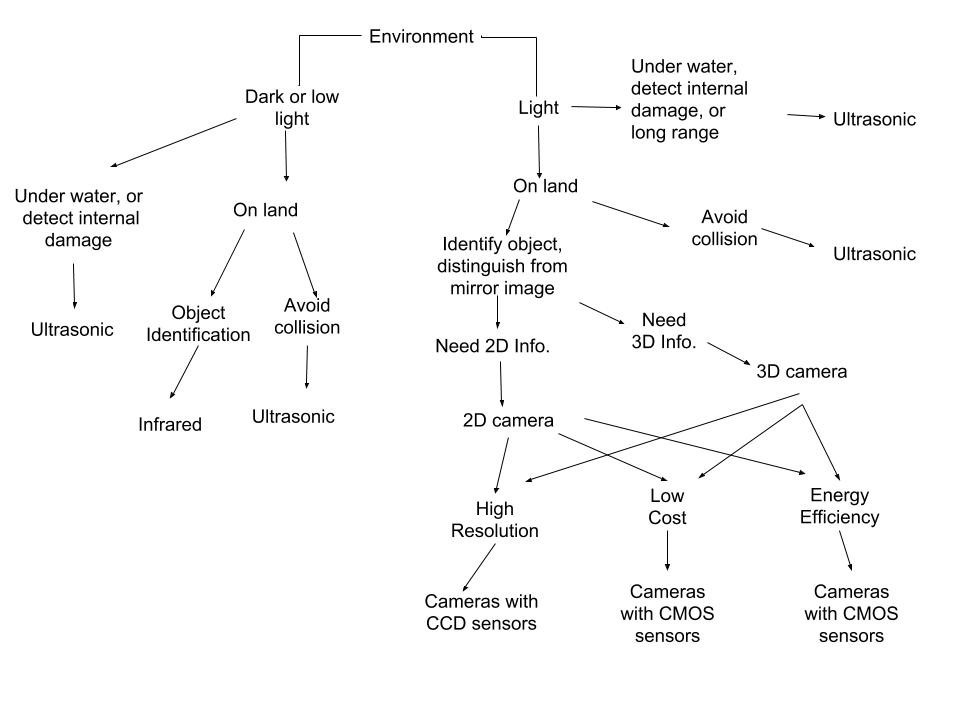 摄像头选择流程图
摄像头选择流程图 各种类型相机特性对比
各种类型相机特性对比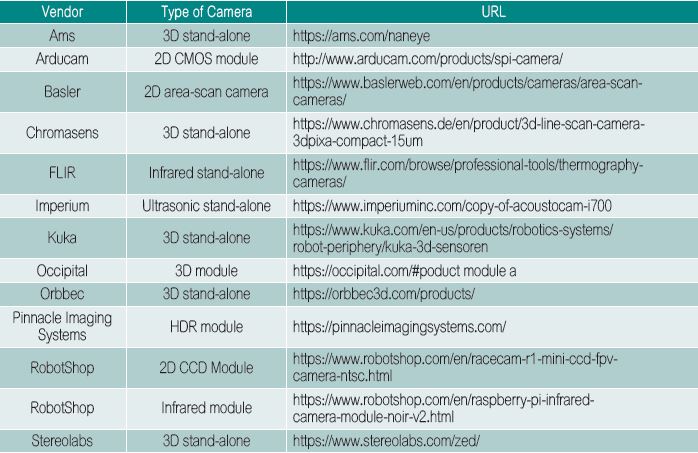 具有代表性的机器人视觉摄像头供应商
具有代表性的机器人视觉摄像头供应商本文为《电子工程专辑》2020年5月刊杂志文章,版权所有,禁止转载。点击申请免费杂志订阅

