



众所周知,当数据量足够多时,深度监督模型会被训练得很好,但目前的深度学习仍存在泛化性能不好和训练效率不高的问题,研究人员一直在寻求构建智能模型的新方法。当前人们探求的方向总是更深的网络,但这意味着更高的算力消耗。因此正如人们所思考的那样,必须寻找一种需要更少数据或更少神经网络层的方法,让机器实现智能化。
最近,来自MIT CSAIL、维也纳工业大学、奥地利科技学院的团队已经开发了一种基于线虫大脑的新型AI系统。研究成果登上了最近的《自然·机器智能》杂志。
他们发现,具有19个控制神经元的单个算法,通过253个突触将32个封装的输入特征连接到输出,可以学习把高维输入映射到操纵命令。
这种新的AI系统用少量人工神经元控制车辆转向。而基于CNN和LSTM的神经网络打造同样的自动驾驶系统,网络结构则要复杂得多。
该方法受线虫等小型动物大脑的启发,仅用数十个神经元即可控制自动驾驶汽车,而常规深度神经网络方法(如 Inception、ResNet、VGG 等)则需要数百万神经元。这一新型网络仅使用 75000 个参数、19 个神经元,比之前减少了数万倍!
该方法还带来了额外的好处,由于神经元数量稀少,这样的网络不再是深度模型的「黑箱」,人们可以知道网络在每个运行阶段的情况。该研究项目负责人 Radu Grosu 教授表示:「正如线虫(nematode C. elegans)这种生命,它们以惊人的少量神经元实现有趣的行为模式。」
这是因为线虫的神经系统能够以高效、协调的方式处理信息。该系统证明深度学习模型仍有改进空间。如果线虫在进化到接近最优的神经系统结构后,能够凭借极少量神经元做出有趣的行为反应,那我们也可以让机器做到。该神经系统可以让线虫执行移动、动作控制和导航行为,而这恰恰是自动驾驶等应用所需要的。
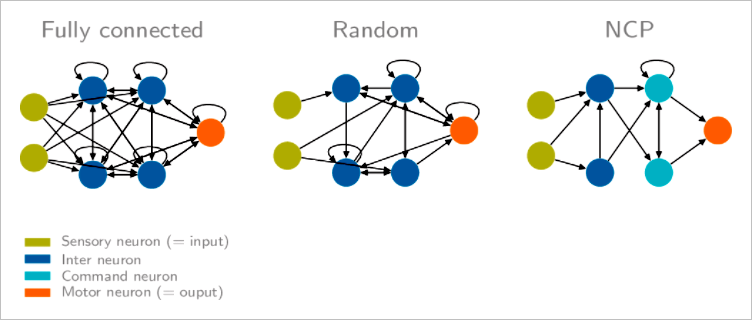
该研究参与者之一 Thomas Henzinger 教授表示,他们按照这一神经系统,「开发了一种新型数学神经元和突触模型」——liquid time constant(LTC)神经元。简化神经网络的一种方式是使之变得稀疏,即并非每一个单元都与其他单元相连接。当一个单元被激活时,其他单元未被激活,这可以降低计算时间,因为所有未被激活单元没有任何输出(或者输出为 0,可以极大地加快计算速度)。
这一新系统包括两部分。
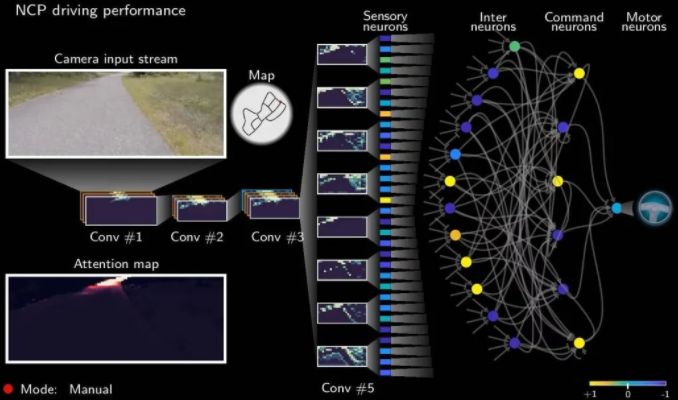
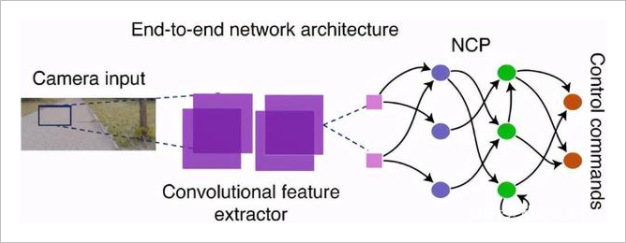
首先是一个紧凑的卷积神经网络,用于从输入图像像素中提取结构特征。使用这类信息,网络能够确定图像的哪些部分较为重要或有趣,并仅将这部分图像传输至下一个步骤。
该研究提出新架构的端到端表示。
第二个部分即「控制系统」,它利用一组生物启发神经元做出的决策来控制汽车。这一控制系统又叫做「神经电路策略」(neural circuit polic,NCP)。
它将紧凑卷积模型的输出数据转换到仅有 19 个神经元的 RNN 架构中(该架构受线虫神经系统的启发),进而控制汽车。
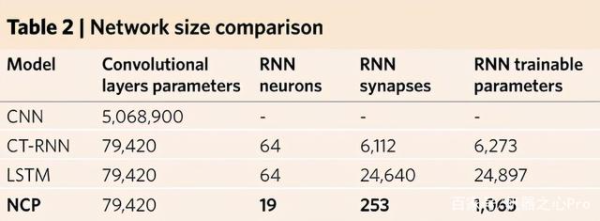
这带来了参数量的锐减。论文一作 Mathias Lechner 表示「NCP 比之前的 SOTA 模型小了三个数量级」,参见下表 2。
由于该架构规模很小,因此我们可以看清楚其注意力在输入图像的哪一部分。研究者发现,用这么小的网络提取图像最重要部分时,这些神经元只关注路边和视野。在目前着重于分析图像每一个细节的人工智能系统中,这是很独特的行为。
与其他网络相比,传输至 NCP 网络的信息可谓少之又少。仅通过上图,我们就可以发现该方法比现有方法更加高效,计算速度也更快。
作者:卓晴
来源:TsinghuaJoking

