

微信公众号:芯片之家(ID:chiphome-dy)
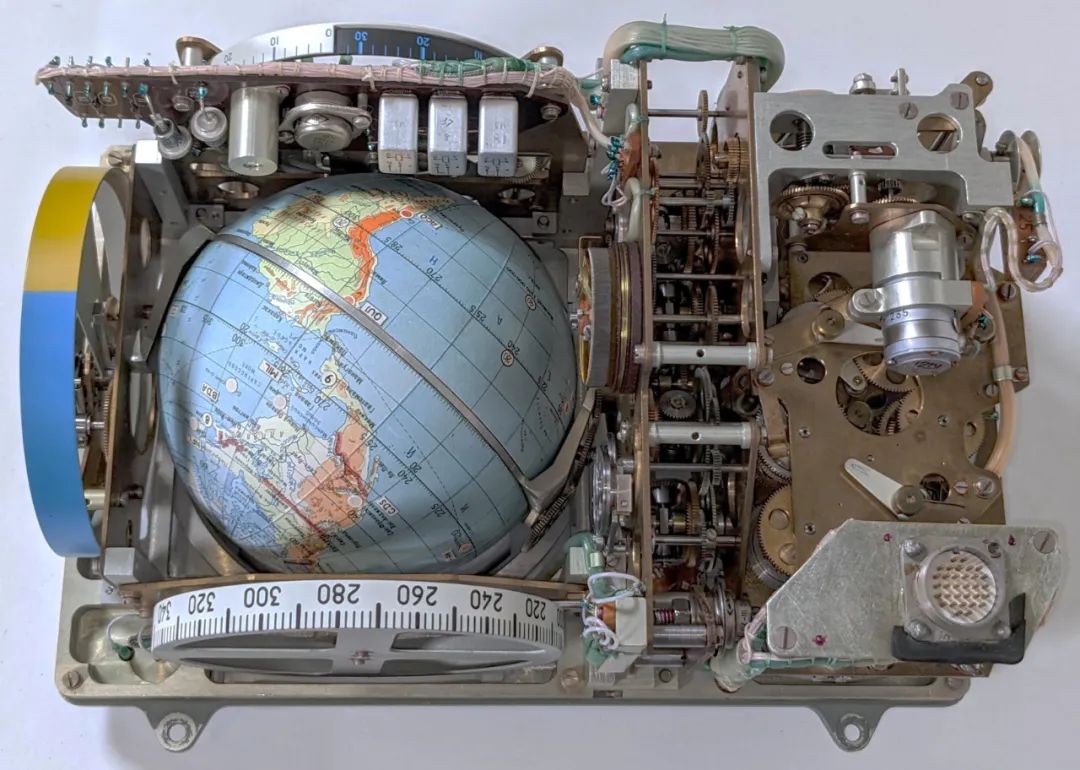
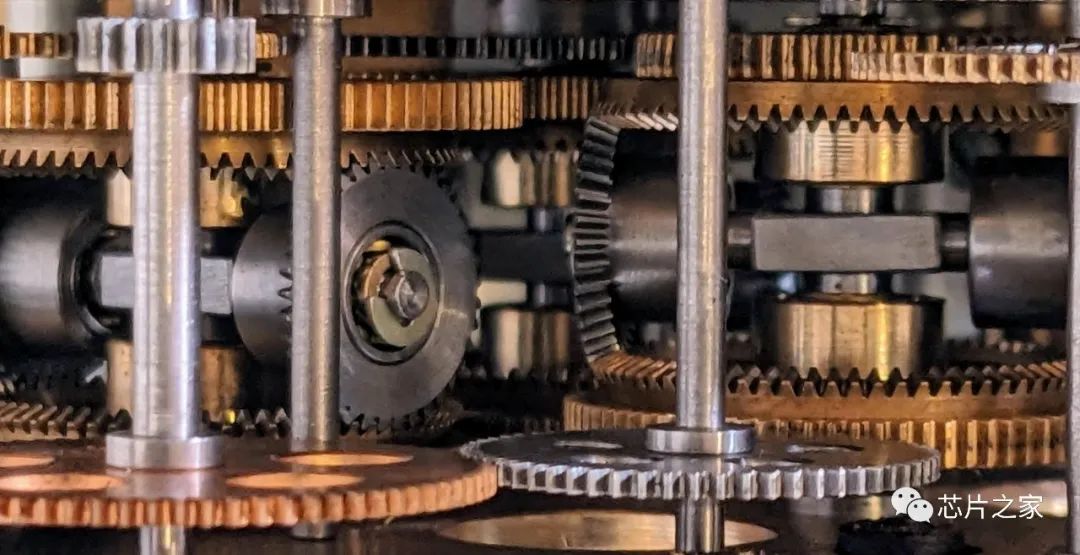
苏联太空计划使用与美国航天器完全不同的控制装置和仪器,联盟号宇宙飞船上最有趣的导航仪器之一是 Globus,它使用旋转的地球仪来指示宇宙飞船在地球上方的位置,这种导航仪器是一种机电模拟计算机,它使用齿轮、凸轮和差速器组成的精密系统来计算航天器的位置。
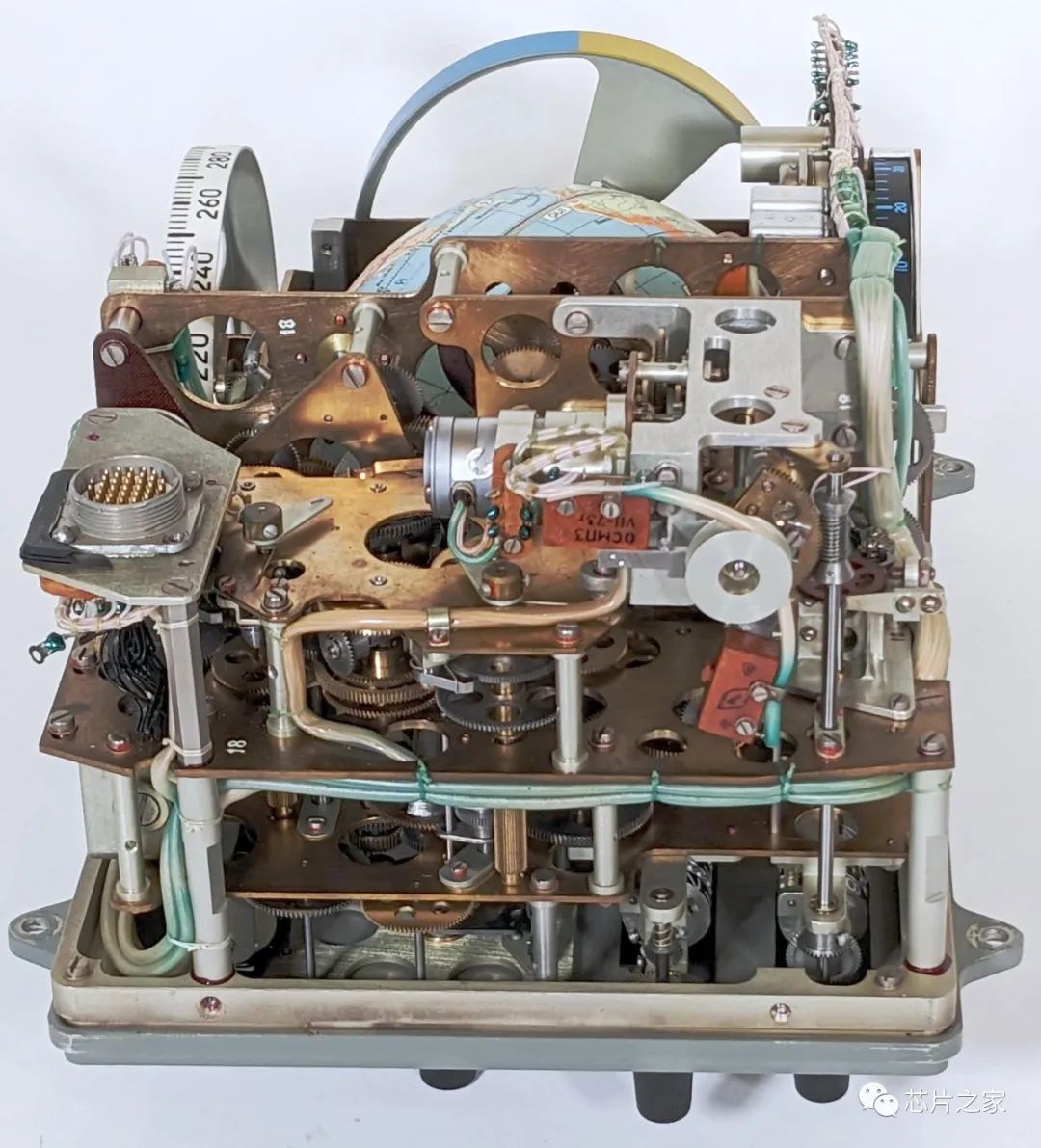
最近从一位收藏家那里收到了一个 Globus,将其打开进行维修和逆向工程。大概看看它是如何运作的,这里展示下它的内部机制,并描述了到目前为止我从逆向工程中学到的东西。下图展示了该设备的机械复杂性,其中还包含一些继电器、螺线管和其他电气元件。
功能性
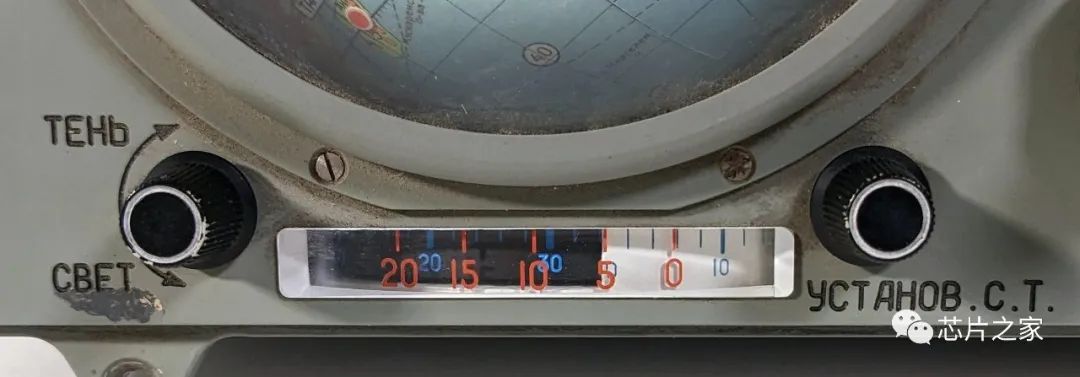
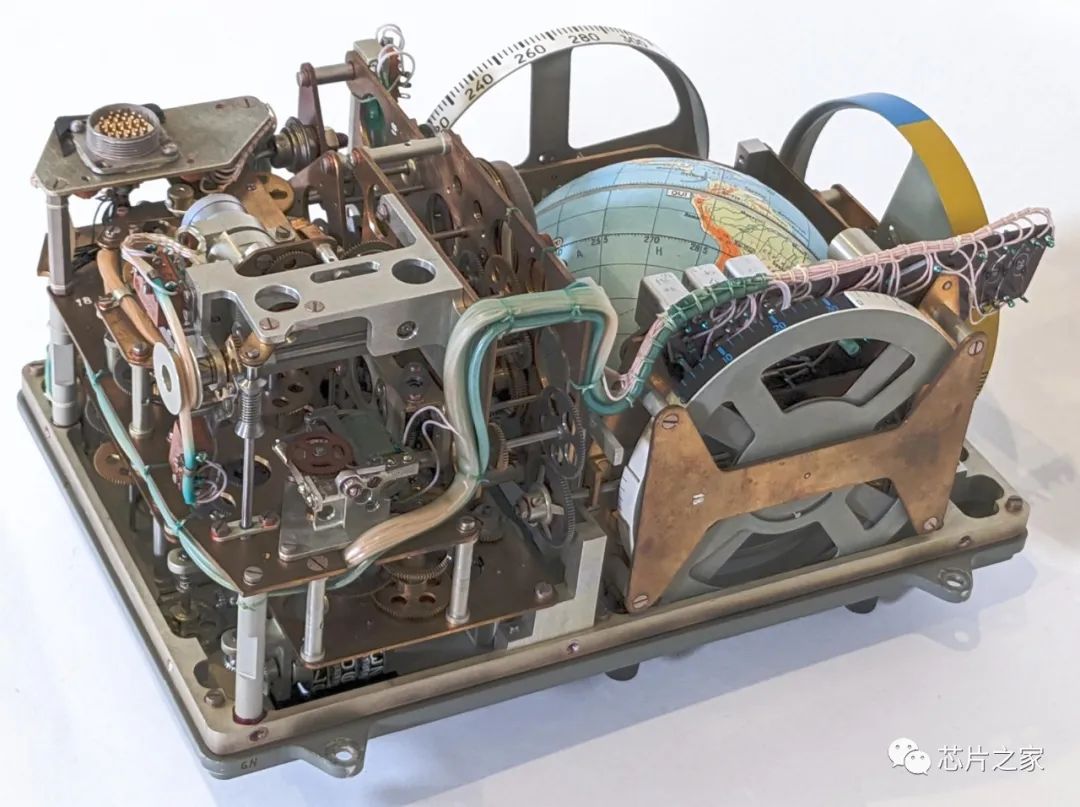
Globus 的主要目的是指示航天器的位置。地球仪旋转,塑料圆顶上固定的十字准线指示航天器的位置。因此,地球仪与宇航员对地球的看法相匹配,使他们能够确认自己的位置。地球旁边的纬度和经度刻度盘提供了位置的数字指示。同时,底部的光影刻度盘显示飞船何时会被太阳照亮或处于阴影中,这是对接的重要信息。Globus 也有一个轨道计数器,指示轨道数。
Globus 有第二种模式,指示航天器如果发射逆向火箭开始着陆,将在何处着陆。按下开关会导致地球仪旋转,直到着陆点位于十字准线下方,宇航员可以评估该着陆点的适用性。
宇航员通过转动旋钮来设置航天器的初始位置和轨道周期来配置Globus,与阿波罗制导计算机不同,Globus 没有从惯性测量单元 (IMU) 或其他来源接收导航信息,因此它不知道航天器的真实位置,纯粹是预测位置的显示。

地球着陆
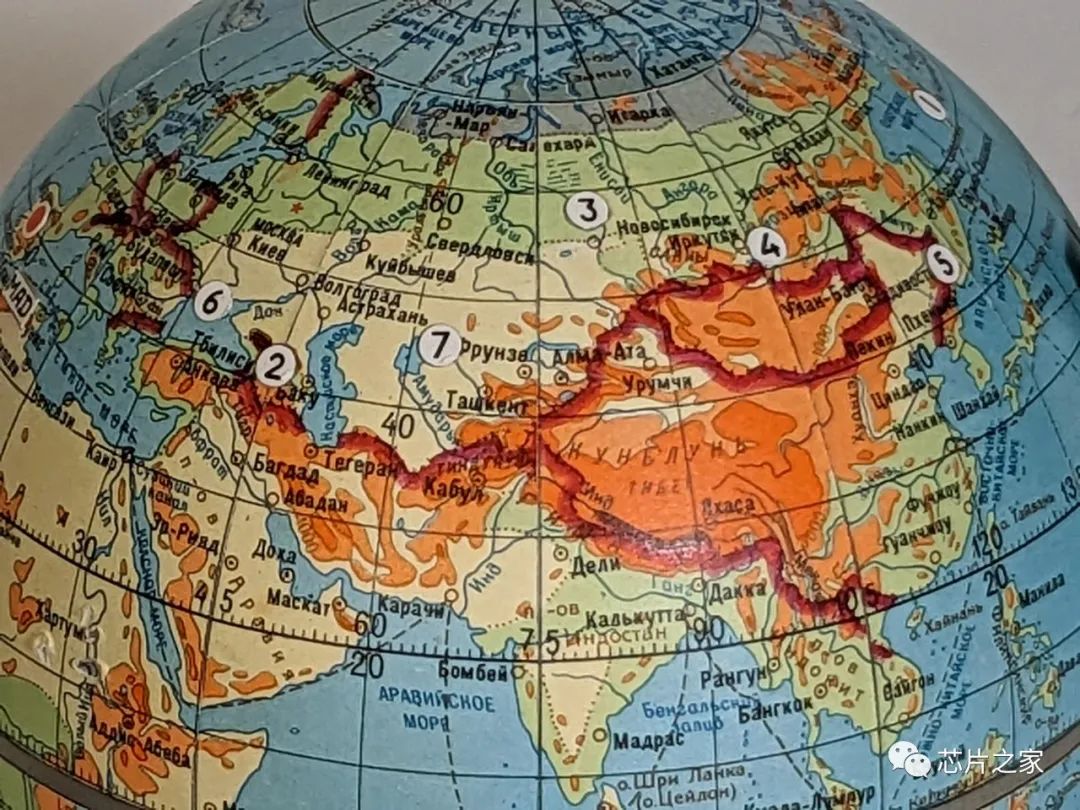
地球本身因其体积小,这里显示了山脉、湖泊和河流等地形特征。地图上的这些特征帮助宇航员将他们的位置与他们在地球上看到的地理特征进行比较。这些特征对于选择着陆点也很重要,这样他们就可以看到他们将在什么样的地形上着陆。大多数情况下,地图没有显示政治边界,除了红色和紫色的粗线。这条线显示了苏联的边界,以及共产主义国家和非共产主义国家之间的边界,对于选择着陆点也很重要。地球上还有编号为 1 到 8 的圆圈,表示与航天器通信的无线电站点,使宇航员能够确定可以联系哪些地面站。


电子部分

60年代的继电器的样子
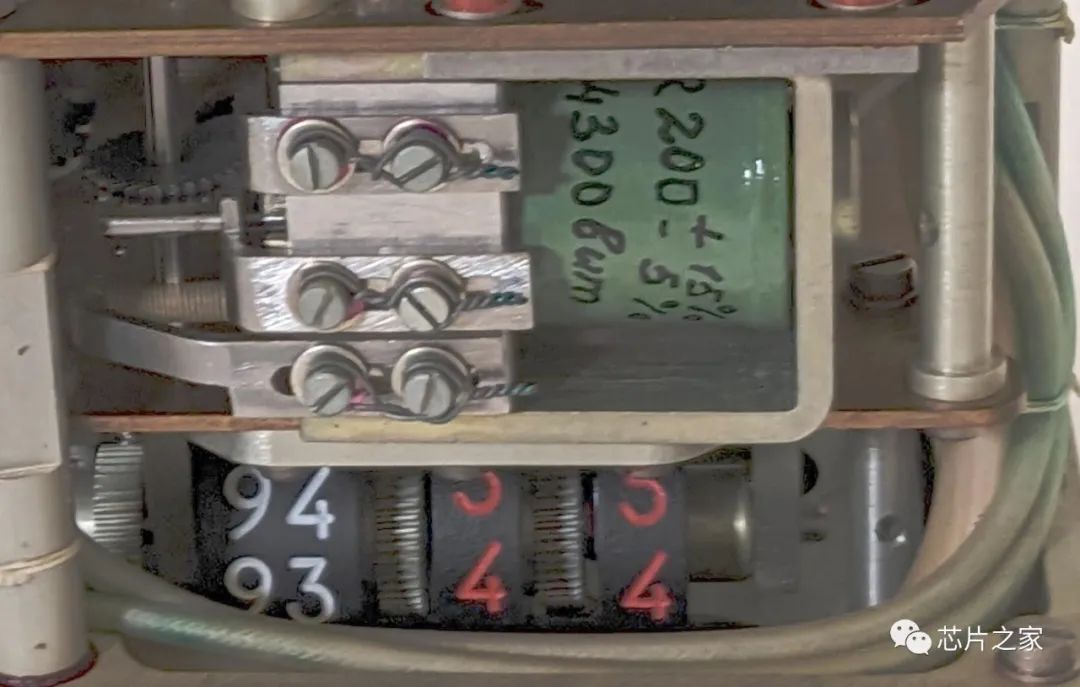
一个 360° 电位器(下图)将航天器的轨道位置转换为电压。消息来源表明,Globus 将此电压信号提供给航天器上的其他单元。我感觉是电子板上的晶体管放大了这个电压,但仍在确认中。
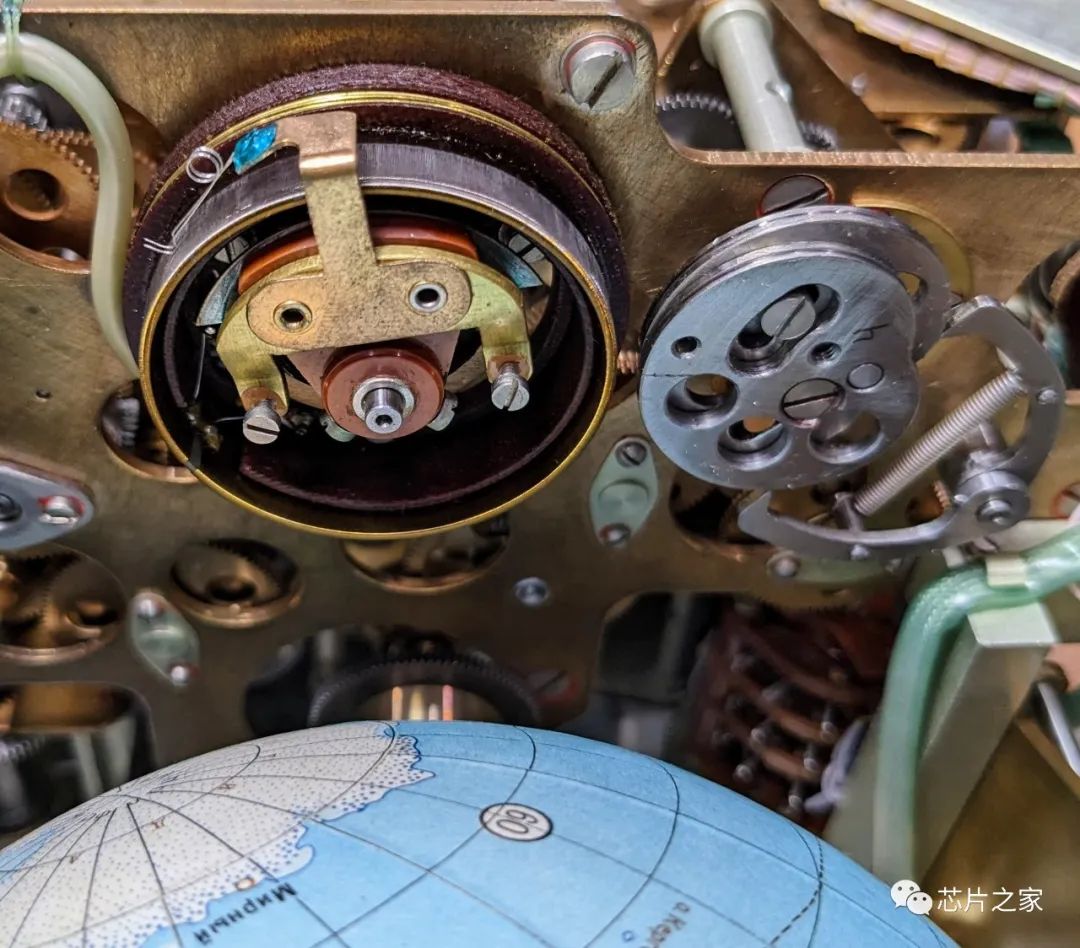
60年代的电位器的样子
整齐美观的线束
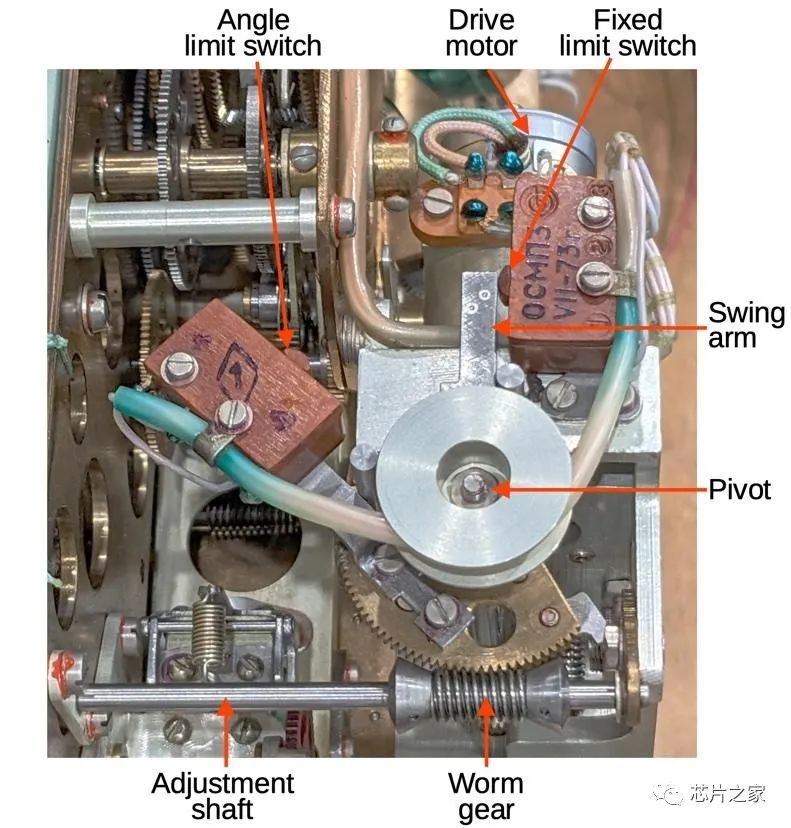
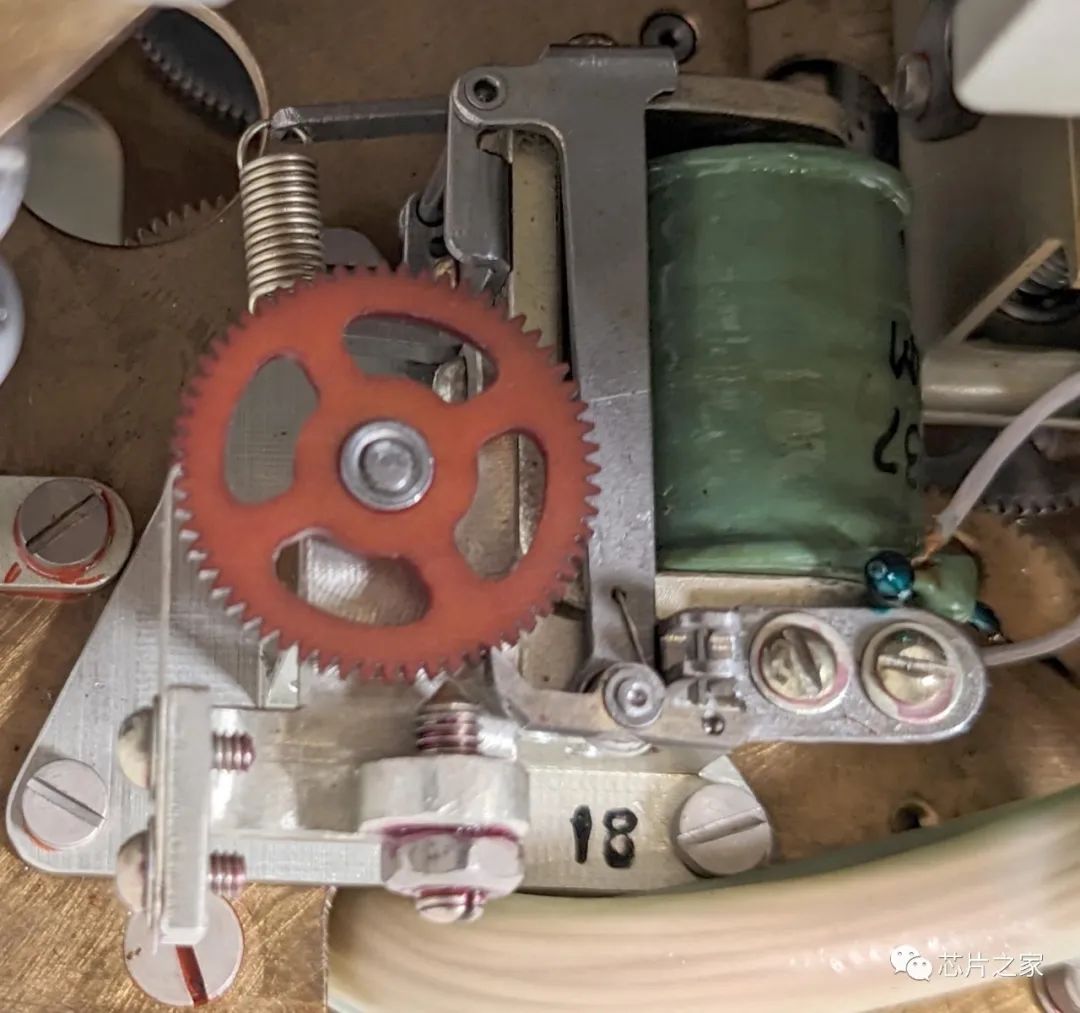
驱动螺线管
该装置由两个棘轮螺线管驱动:一个用于轨道旋转,一个用于地球自转。这些螺线管接收 1 赫兹的 27 伏脉冲。3 每个脉冲使螺线管使齿轮前进一个齿;棘爪可防止齿轮滑回。这些小的旋转驱动整个 Globus 的齿轮,并导致地球仪发生微小的移动。
最后
Globus INK 是一台非凡的机器,一台模拟计算机,通过齿轮、凸轮和差速器的复杂系统计算轨道。它为宇航员提供了航天器位置的高分辨率、全彩显示,远远超过了 1960 年代电子太空计算机所能提供的。


往期推荐
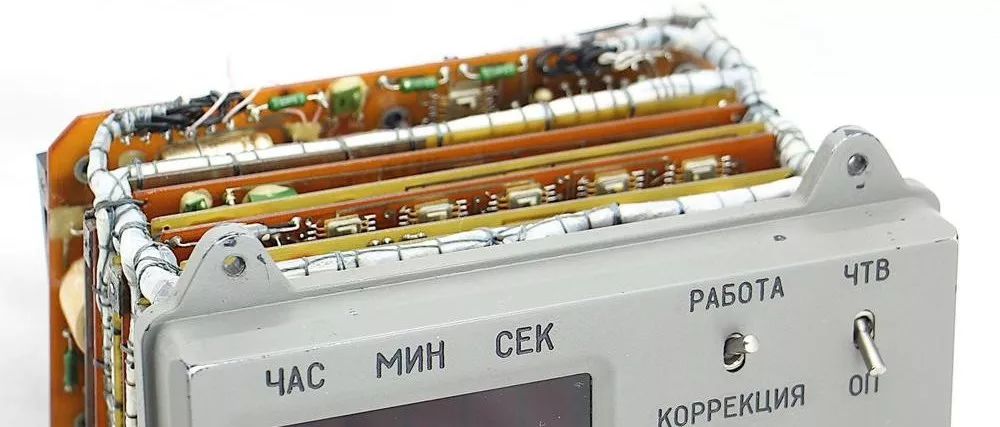
【绝密】上世纪苏联联盟号宇宙飞船内部时钟电路曝光!
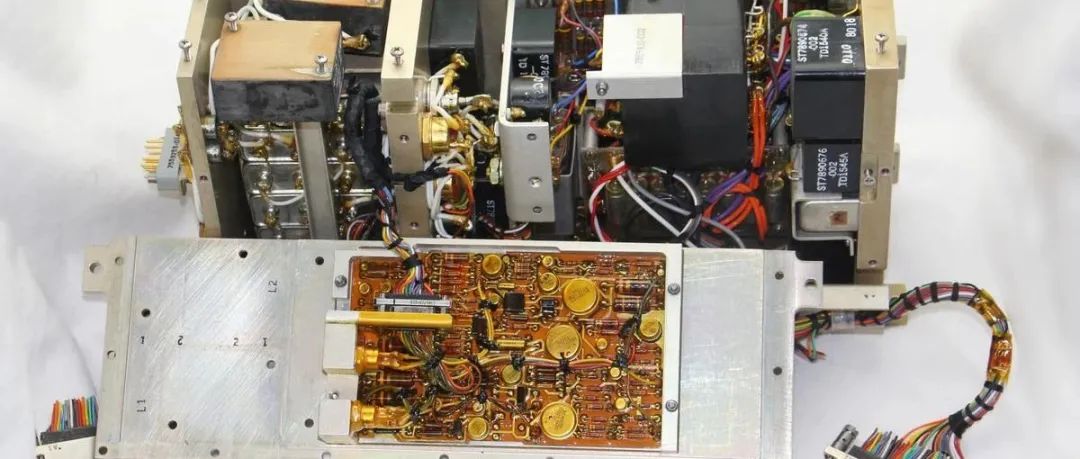
【绝密】泰坦导弹制导计算机内部!

