


脉冲信号用于设备控制是比较常见的,但在一些情况下,我们希望精准的控制脉冲的数量以实现对运动的精确控制,实现的方式也有多种多样。定时器是单片机内部最基础且常用的外设,有着非常丰富的功能,如输入功能(测量输入信号的脉冲宽度、频率,PWM 输入等),输出功能(PWM 输出、死区时间可编程的互补输出、 单脉冲模式输出等) ,容易想到使用定时器输出PWM来实现此类操作。
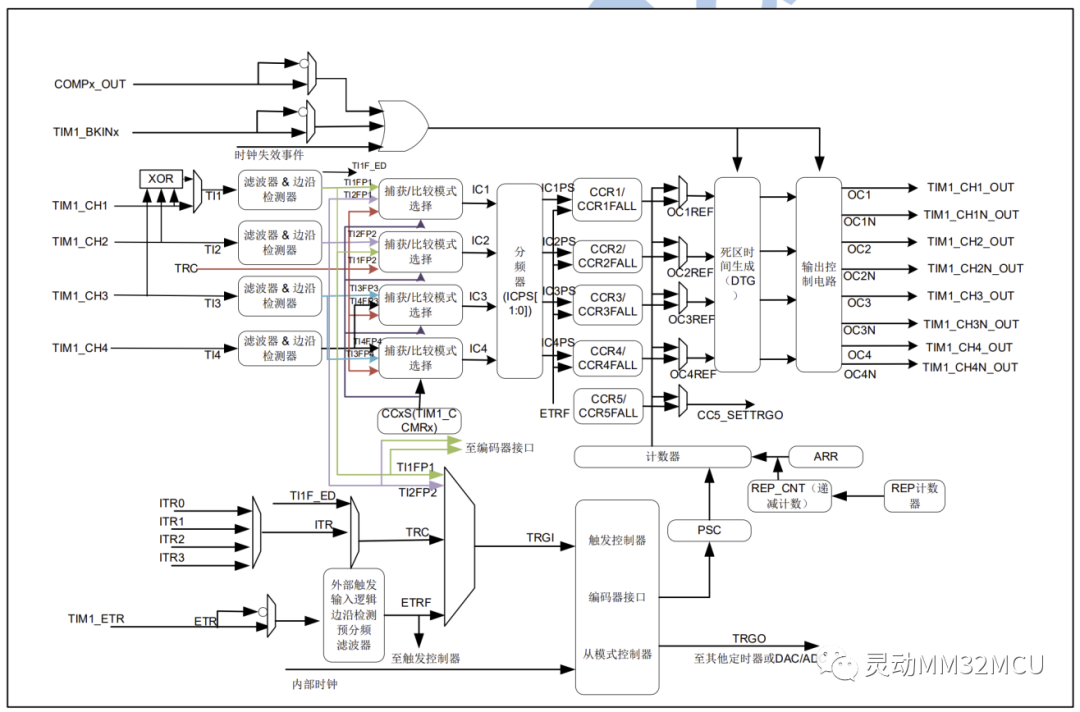
MM32F5270系列集成有丰富的外设模块,其中定时器部分包括 2 个 16 位高级定时器, 2 个 16 位通用定时器、 2 个 32 位通用定时器, 2 个 16 位基础定时器和1 个低功耗定时器。以TIM1为例,该模块主要由输入单元、输出单元、时基单元、捕获/比较模块、刹车单元等结构组成,功能框图如下:
这里以MM32F5270定时器应用为例,介绍几种常用的精准输出脉冲数量的方法:
1►
中断计数方式
定时器配置为PWM输出模式,在PWM中断程序中计数,判断PWM输出次数达到设定值时,停止PWM输出。
中断计数的方式实现起来简单,但也存在明显的缺点。当PWM频率较高时,频繁的中断将影响程序运行的效率,占用大量的MCU资源,这在大多数情况下是不可接受的。以下几种方式较为优化。
2►
定时器单脉冲重复计数
定时器单脉冲输出是定时器比较输出中的一种模式,在定时器比较输出模式的基础上进行配置。单脉冲模式(OPM)下,计数器响应一个激励,产生一个脉宽可调的脉冲。配置 TIMx_CR1 寄存器的OPM=1,选择单脉冲模式。

单脉冲模式可以使定时器输出1个脉冲,而重复计数器可以用来调整更新事件产生的频率。
边沿对齐模式下,向上计数时,重复计数器在计数器每次上溢时递减;向下计数时,重复计数器在计数器每次下溢时递减。中央对齐模式下,重复计数器在计数器上溢和下溢时皆递减。通过配置 TIMx_RCR 寄存器的 REP 来调整更新事件产生的频率,重复计数器在 REP+1 个计数周期后产生更新事件。
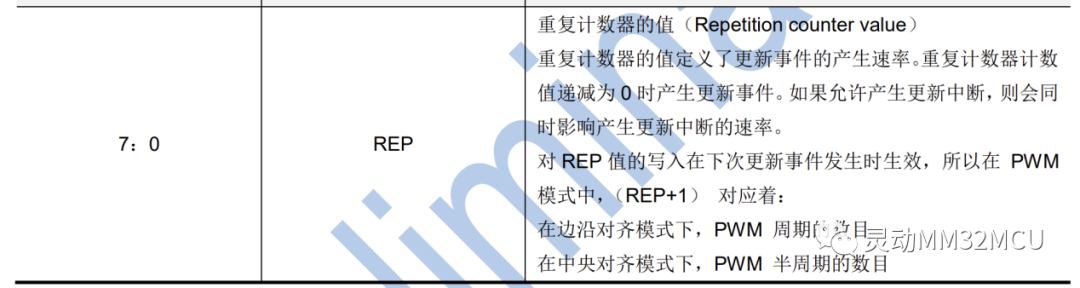
配置TIM1输出PWM,使能单脉冲模式,配置REP(重复计数器的值)为9,即TIM1在输出10个脉冲后发生更新事件,相关代码如下:
voidTIM1_Monopulse_Init(u16arr,u16psc)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStruct;
TIM_OCInitTypeDefTIM_OCInitStruct;
TIM_ICInitTypeDefTIM_ICInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1,ENABLE);
TIM_DeInit(TIM1);
TIM_TimeBaseStructInit(TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period=arr;
TIM_TimeBaseStruct.TIM_Prescaler=psc;
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter=9;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1,TIM_TimeBaseStruct);
TIM_OCStructInit(TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=arr/2;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OCIdleState=TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1,TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1,ENABLE);
TIM_SelectOnePulseMode(TIM1,TIM_OPMode_Single);
TIM_SetCounter(TIM1,0);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);
}逻辑分析仪接PA8(程序中配置PA8作为TIM1_CH1),观测输出波形如下:

由于REP只有8位,所以它最大是255,当然也可以进行一些判断后再次赋值,目前只有高级定时器具有重复计数功能。
3►
DMA方式
使用DMA功能更新PWM的输出,DMA传输将数据从一个地址空间复制到另一个地址空间,提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。它允许不同速度的硬件装置来沟通,而不需要依赖于MPU的大量中断负载。该方式占用很少的MCU资源,实现脉冲发送的精确控制。
通过设置DMA传输数据的数量,可以控制发送的脉冲数。通过设置不同的装载值和顺序,可以使用不同频率和脉宽。
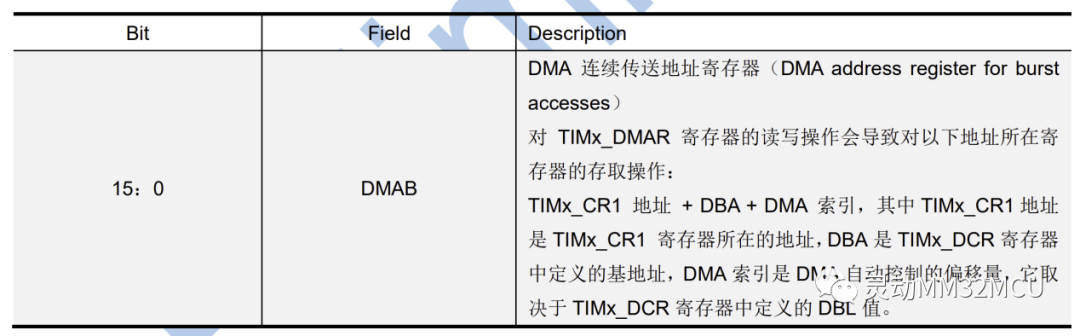
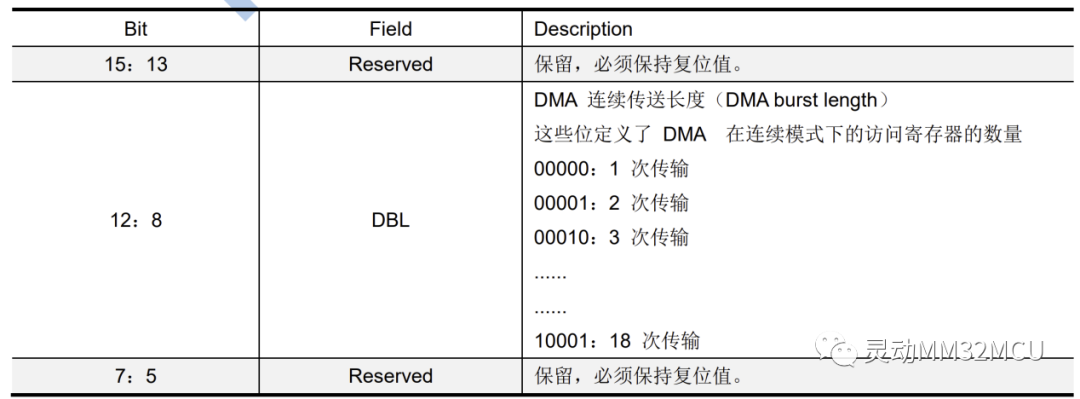
TIMx_DCR 和 TIMx_DMAR 寄存器跟 DMA 模式相关。DMA 控制器的目标是唯一的,必须指向TIMx_DMAR 寄存器。开启 DMA 使能后,在给定的 TIMx 事件发生时, TIMx 会给 DMA 发送请求。对TIMx_DMAR 寄存器的每次写操作都被重定向到一个 TIMx 寄存器。
TIMx_DMAR 连续模式 DMA 地址寄存器:
TIMx_DCR DMA 控制寄存器:
程序中配置TIM1的更新周期为10ms。
TIM1_PWM_Init(10000-1,SystemCoreClock/1000000-1);
定义一个数组,元素的数量表示可以控制发送的脉冲数,元素的值表示脉宽。
staticu16data[10]={1000,2000,3000,4000,5000,6000,7000,8000,9000,0};
配置TIM1输出PWM,相关代码同上,使能COM的DMA请求,配置DMA初始化,使能DMA传输完成中断,TIM1_CH1对应DMA1_Channel2。
voidTIM1_DMA_Init(void)
{
DMA_InitTypeDefDMA_InitStruct;
DMA_Channel_TypeDef*channel;
channel=DMA1_Channel2;
RCC_DMA_ClockCmd(DMA1,ENABLE);
DMA_DeInit(channel);
DMA_StructInit(DMA_InitStruct);
//Transferregisteraddress
DMA_InitStruct.DMA_PeripheralBaseAddr=(u32)(TIM1->CCR1);
//Transfermemoryaddress
DMA_InitStruct.DMA_MemoryBaseAddr=(u32)data;
//Transferdirection,frommemorytoregister
DMA_InitStruct.DMA_DIR=DMA_DIR_PeripheralDST;
DMA_InitStruct.DMA_BufferSize=10;
DMA_InitStruct.DMA_PeripheralInc=DMA_PeripheralInc_Disable;
//Transfercompletedmemoryaddressincrement
DMA_InitStruct.DMA_MemoryInc=DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_PeripheralDataSize=DMA_PeripheralDataSize_HalfWord;
DMA_InitStruct.DMA_MemoryDataSize=DMA_MemoryDataSize_HalfWord;
DMA_InitStruct.DMA_Mode=DMA_Mode_Normal;//DMA_Mode_Circular;
DMA_InitStruct.DMA_Priority=DMA_Priority_High;
DMA_InitStruct.DMA_M2M=DMA_M2M_Disable;
DMA_InitStruct.DMA_Auto_reload=DMA_Auto_Reload_Disable;
DMA_Init(channel,DMA_InitStruct);
DMA_ITConfig(channel,DMA_IT_TC,ENABLE);
DMA_Cmd(DMA1_Channel2,ENABLE);
}
DMA中断服务子程序:
voidDMA1_Channel2_IRQHandler(void)
{
if(DMA_GetITStatus(DMA1_IT_TC2)){
DMA_ClearITPendingBit(DMA1_IT_TC2);
TIM_Cmd(TIM1,DISABLE);
}
}
逻辑分析仪接PA8(程序中配置PA8作为TIM1_CH1),观测输出波形如下:

输出9个脉冲,脉宽分别为10%、20%、30%......90%。
DMA方式算是一个很确定的方式,不会丢失脉冲。当需要发送较多数量的脉冲时,则可以使用DMA传输完成中断中切换DMA传输的数据起始地址及发送数量。
4►
主从模式
定时器同步功能可以配置多个定时器在内部相连。
利用定时器的主从模式,即一个是主定时器,一个是从定时器,由主定时器输出脉冲信号,主定时器产生的更新触发传递给从定时器进行计数,溢出时触发从定时器的中断服务函数。通过主从定时器进行设定,不占用主程序时钟,且能精准控制。
主从关系要遵循参考手册中所提供的配置,TIMx之间的互联:

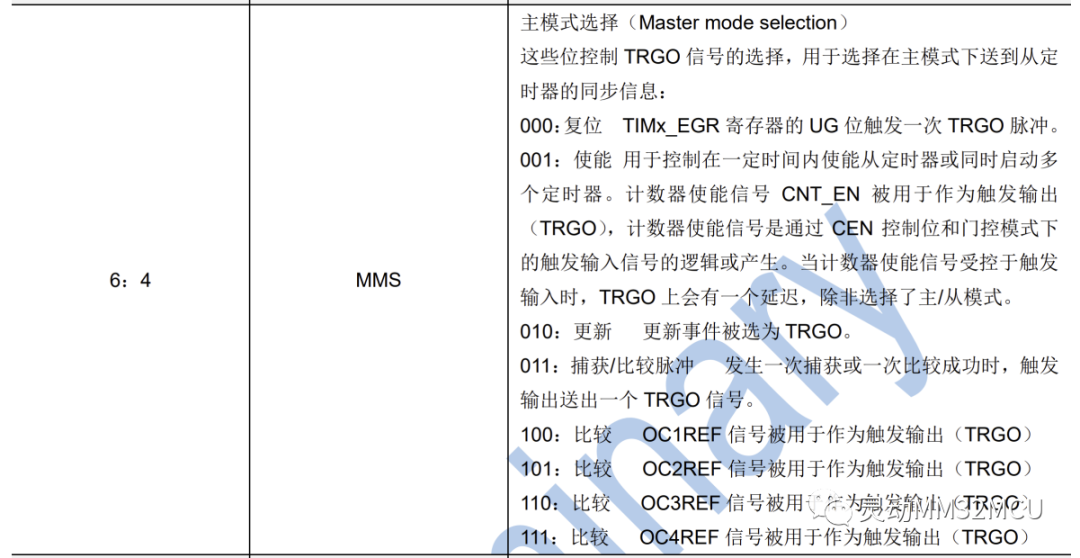
参考TIMx_CR2和TIMx_SMCR寄存器配置主从模式。
TIMx_CR2 控制寄存器 2:
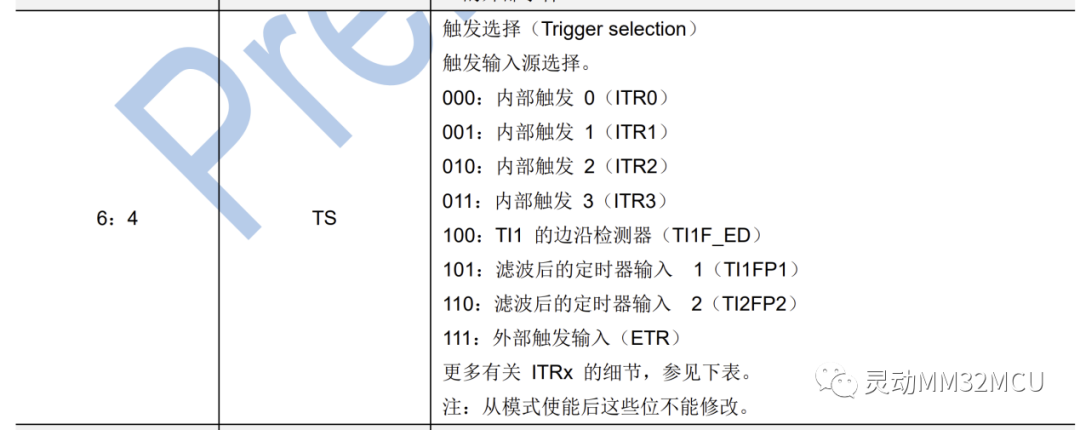
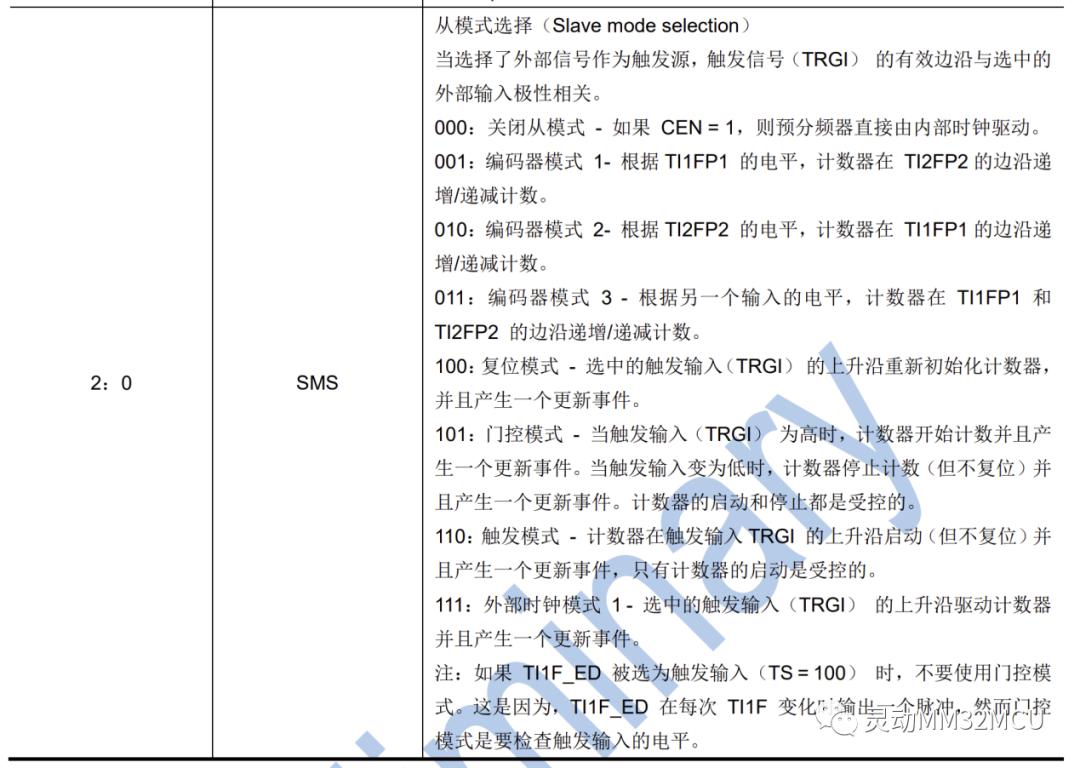
TIMx_SMCR 从模式控制寄存器:
配置TIM1为主模式,输出PWM:
voidTIM1_Master_Init(u16arr,u16psc)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStruct;
TIM_OCInitTypeDefTIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1,ENABLE);
TIM_TimeBaseStructInit(TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period=arr;
TIM_TimeBaseStruct.TIM_Prescaler=psc;
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter=0;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1,TIM_TimeBaseStruct);
TIM_OCStructInit(TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=499;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OC1Init(TIM1,TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1,ENABLE);
TIM_SelectMasterSlaveMode(TIM1,TIM_MasterSlaveMode_Enable);
TIM_SelectOutputTrigger(TIM1,TIM_TRIGSource_Update);
TIM_SetCounter(TIM1,0);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1,ENABLE);
}
配置TIM3为从模式,选择ITR0触发(对应内部触发源TIM1),使能更新中断:
voidTIM3_Slave_Init(u16arr,u16psc)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStruct;
RCC_APB1PeriphClockCmd(RCC_APB1ENR_TIM3,ENABLE);
TIM_TimeBaseStructInit(TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period=arr;
TIM_TimeBaseStruct.TIM_Prescaler=psc;
TIM_TimeBaseStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter=0;
TIM_TimeBaseStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,TIM_TimeBaseStruct);
TIM_ARRPreloadConfig(TIM3,DISABLE);
TIM_SelectInputTrigger(TIM3,TIM_TS_ITR0);
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_External1);
TIM_SelectMasterSlaveMode(TIM3,TIM_MasterSlaveMode_Enable);
TIM_ClearFlag(TIM3,TIM_FLAG_Update);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_SetCounter(TIM3,0);
TIM_Cmd(TIM3,ENABLE);
}
TIM3控制脉冲数量,此处设置为10:
TIM3_Slave_Init(10,0);
TIM3中断服务子程序:
voidTIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET){
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
TIM_CtrlPWMOutputs(TIM1,DISABLE);
TIM_Cmd(TIM1,DISABLE);
TIM_Cmd(TIM3,DISABLE);
TIM_ITConfig(TIM3,TIM_IT_Update,DISABLE);
}
}
逻辑分析仪接PA8(程序中配置PA8作为TIM1_CH1),观测输出波形如下:

TIM1输出10个脉冲后停止。
以上简要列举了几种控制脉冲数量输出的方式,以MM32F5270为例演示其实现的可行性。在实际应用中,几种方法各有优缺点,具体的方式还需要根据资源和需求进行综合考虑。
往期精彩
第232讲 | 使用MM32L0130 SLCD驱动LCD显示
第229讲 | 基于MM32F0140的UDS Bootloader学习笔记
第224讲 | MM32F0140 FlexCAN一致性测试 (2)
第223讲 | MM32F0140 FlexCAN一致性测试 (1)
第222讲 | MM32F0140学习笔记——独立看门狗(IWDG)
第221讲 | 使用MM32F3270基于Azure RTOS抢占任务的应用
第220讲 | 使用MM32F3270基于Azure RTOS事件标志组的应用
第219讲 | 使用MM32F3270基于Azure RTOS消息队列的应用
第218讲 | 使用MM32F3270基于Azure RTOS (ThreadX)的多任务调度
第217讲 | 使用MM32F3270基于Azure RTOS (ThreadX) 的移植
第215讲 | MM32F0140学习笔记——窗口看门狗(WWDG)
第213讲 | MM32F0140学习笔记——FlexCAN 控制器局域网
第212讲 | 工程师笔记——MM32F0040使用总结 (2)
第211讲 | 工程师笔记——MM32F0040使用总结 (1)
第207讲 | MM32F0140学习笔记——时钟系统RCC
第200讲 | 使用MM32F0270 定时器DMA方式输出PWM
关于灵动
上海灵动微电子股份有限公司成立于 2011 年,是中国本土领先的通用 32 位 MCU 产品及解决方案供应商。公司基于 Arm Cortex-M 系列内核开发的 MM32 MCU 产品拥有 F/L/A/SPIN/W 五大系列,目前已量产 200多款型号,累计交付超3亿颗,每年都有近亿台配备了灵动 MM32MCU 的优秀产品交付到客户手中,在本土通用 32 位 MCU 公司中位居前列。

灵动客户涵盖智能工业、汽车电子、通信基建、医疗健康、智慧家电、物联网、个人设备、手机和电脑等应用领域。灵动是中国为数不多的同时获得了 Arm-KEIL、IAR、SEGGER 官方支持的本土 MCU 公司,并建立了独立、完整的通用 MCU 生态体系。灵动始终秉承着“诚信、承诺、创新、合作”的精神,为客户提供从硬件芯片到软件算法、从参考方案到系统设计的全方位支持。

灵动股份


长按识别二维码关注我们

MORE
官网:www.mm32mcu.com
微信公众号:灵动MM32MCU
灵动MM32MCU技术论坛:
bbs.21ic.com/iclist-696-1.html
