


介绍
无刷直流电机或 BLDC 电机已成为现代驱动技术的重要贡献者。它们迅速普及,在消费电器、汽车工业、工业自动化、化学和医疗、航空航天和仪器仪表领域的应用范围越来越广。
尽管它们长期用于驱动和发电,但一直以有刷直流电机为主的亚千瓦级范围一直是灰色地带。但现代电力电子和微处理器技术使小型无刷直流电机在价格和性能方面都蓬勃发展。
什么是 BLDC 电机?
无刷直流电机类似于有刷直流电机,但顾名思义,BLDC 不使用电刷进行换向,而是使用电子换向。在传统的有刷直流电机中,当电刷在固定磁场中转动时,电刷用于将动力传输到转子。
如前所述,BLDC 电机使用电子换向,因此消除了机械撕裂的电刷。
BLDC电机的构造
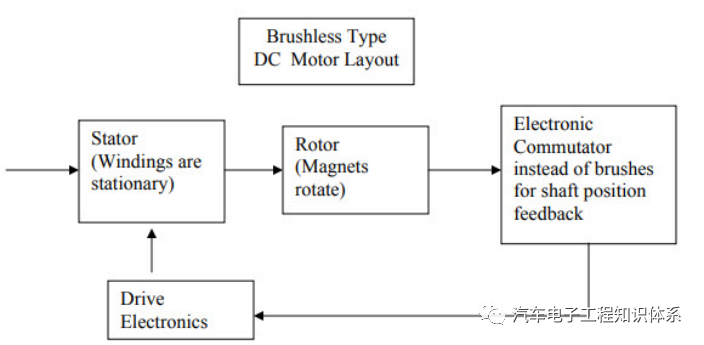
有刷电机和无刷电机的主要设计区别在于用电子开关电路代替机械换向器。请记住,从定子和转子产生的磁场以相同频率旋转的意义上说,BLDC 电机是一种同步电机。
无刷电机提供三种配置:单相、两相和三相。其中,三相 BLDC 是最常见的一种。
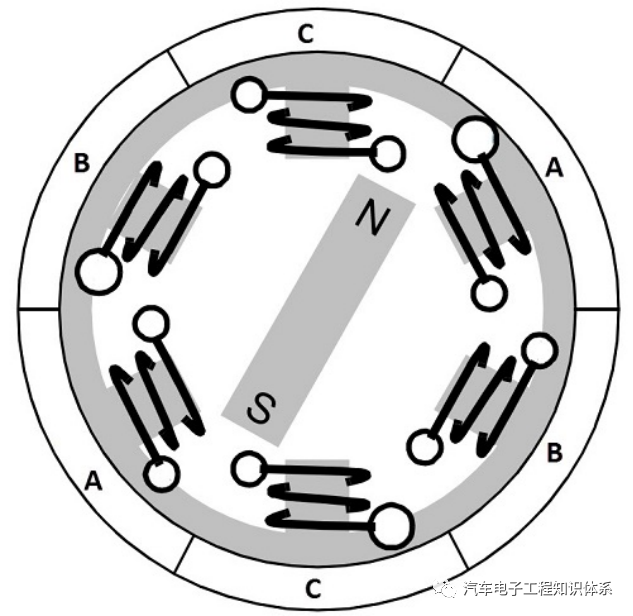
下图显示了 BLDC 电机的横截面。
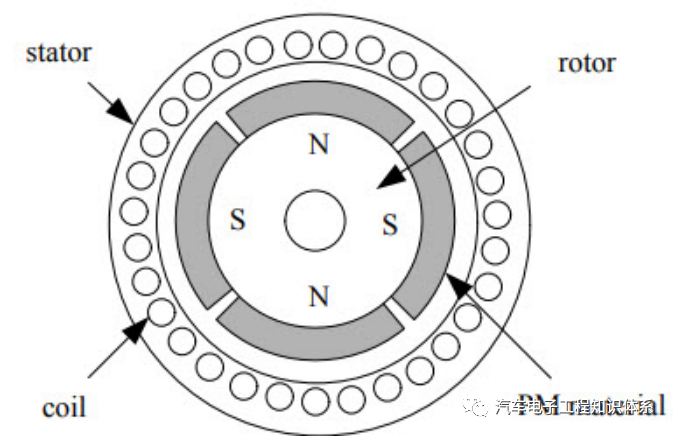
如图所示,BLDC 电机由两个主要部分组成:定子和转子。
定子
BLDC 电机的定子结构类似于感应电机。它由堆叠的钢片组成,带有用于缠绕的轴向切槽。BLDC 中的绕组与传统感应电机的绕组略有不同。

通常,大多数 BLDC 电机由三个以星形或“Y”形连接的定子绕组组成(没有中性点)。此外,基于线圈互连,定子绕组进一步分为梯形和正弦电机。
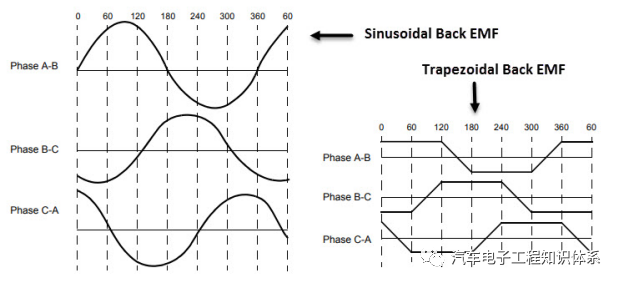
在梯形电机中,驱动电流和反电动势都呈梯形(在正弦电机的情况下为正弦形状)。通常,额定电压为 48 V(或更低)的电机用于汽车和机器人(混合动力汽车和机械臂)。
转子
BLDC 电机的转子部分由永磁体(通常是稀土合金磁体,如钕 (Nd)、钐钴 (SmCo) 和钕、铁氧体和硼合金 (NdFeB))组成。
根据应用,极数可以在 2 到 8 个之间变化,北 (N) 和南 (S) 极交替放置。下图显示了三种不同的磁极排列方式。在第一种情况下,磁铁放置在转子的外周。

第二种配置称为磁嵌入转子,其中矩形永磁体嵌入转子的铁芯中。在第三种情况下,磁铁插入转子的铁芯中。
位置传感器(霍尔传感器)
由于 BLDC 电机中没有电刷,因此换向是电子控制的。为了使电机旋转,定子绕组必须按顺序通电,并且必须知道转子的位置(即转子的北极和南极)以精确地为一组特定的定子绕组通电。
位置传感器,通常是霍尔传感器(根据霍尔效应原理工作),通常用于检测转子的位置并将其转换为电信号。大多数 BLDC 电机使用三个嵌入定子的霍尔传感器来感应转子的位置。
霍尔传感器的输出将是高电平还是低电平,具体取决于转子的北极或南极是否经过它附近。通过结合来自三个传感器的结果,可以确定确切的通电顺序。
工作原理
考虑以下定子 A、B 和 C 中三个绕组的设置。为了便于理解,让我们用单个磁铁替换转子。
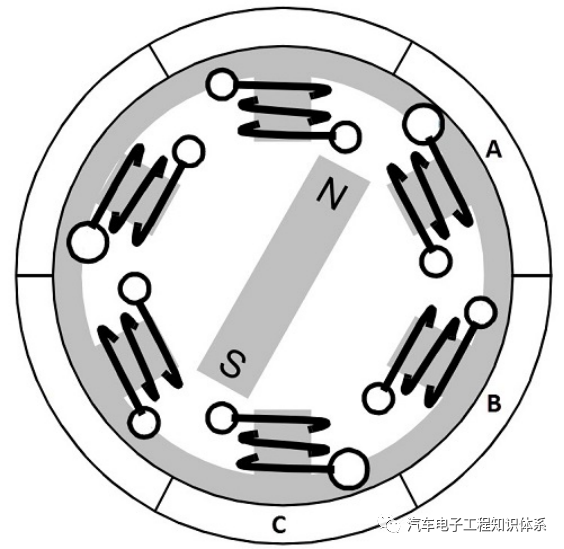
我们知道,当电流通过线圈时,会产生磁场,并且磁力线的方向(即产生的磁体的磁极)将取决于流过线圈的电流方向。
利用这个原理,如果我们向线圈 A 提供电流,它就会产生磁场并吸引转子磁铁。转子磁铁的位置将略微顺时针移动并与 A 对齐。
如果我们现在一个接一个地(按此顺序)通过线圈 B 和 C 的电流,转子磁体将按顺时针方向旋转。
为了提高效率,我们可以使用单个线圈缠绕相反的线圈,从而获得双重吸引力。进一步提高效率,我们可以同时给两个线圈通电,这样一个线圈会吸引磁铁,另一个线圈会排斥它。在此期间,第三个将空闲。
对于转子磁体的完整 360旋转,线圈 A、B 和 C 的六种可能组合是适用的,如下图所示。
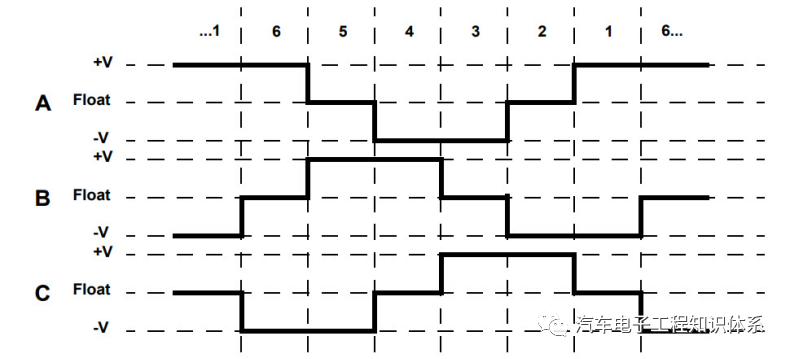
根据上图,我们可以确认在任何时候,一相为正,一相为负,第三相空闲(或浮空)。因此,根据霍尔传感器的输入,我们有两个根据上图切换相位。
驱动无刷直流电机
如果定子和转子是 BLDC 电机不可或缺的组成部分,那么驱动电子设备也同样重要。下图显示了典型无刷直流电机控制或驱动系统的框图。
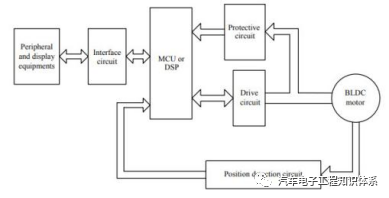
该驱动电路通常称为电子速度控制器系统或简称为 ESC。一种常见的设置称为全桥驱动电路。它由一个带 PWM 输出的 MCU、六个用于定子绕组三相的MOSFET、霍尔传感器的反馈以及一些与电源相关的组件组成。
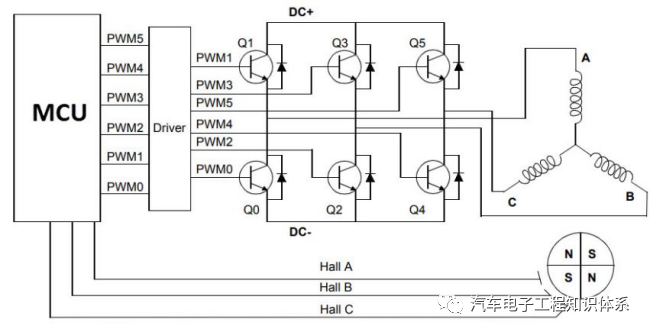
可以对 MCU 进行编程,以根据霍尔传感器的数据适当地切换 MOSFET。
BLDC 电机的优势
由于 BLDC 电机是电子换向的,因此与传统的有刷直流电机相比,有几个优势。他们之中有一些是:
·无磨损(由于没有电刷)
·高效率
·更好的速度与扭矩特性
·长寿
·噪音小或无噪音运行
·RPM 显着提高
无刷直流电机的应用
BLDC 电机的一些应用领域如下所述:
·单速应用
·可调速应用
·位置控制
·低噪音应用
·高速应用
