

对有刷直流电机来说,扭矩是绕组中电流的函数,通过查看电流波形,工程师可以发现电机不旋转或异常旋转的可能原因。因此,需要设立一个有刷直流电机测试平台。事关该平台的第一个建议就是选择一个合适的直流探头,下面许多示例都需要用电流探头进行调试。不过,为确保测量的正确性,在使用电流探头之前,须对探头进行消磁和归零。
再就是选用可以提供足够电流的台式电源。当试图驱动由涌流或失速引起的大电机电流时,由于台式电源的限流能力,电源轨电压可能会受到钳制。确保选择一台可靠的电源,并将电流限制设置得足够高,以供被测电机使用。
熟悉正确的有刷直流电机电流曲线
调试电机时,了解预期的电流曲线有很大的帮助。图1显示了有刷直流电机的典型曲线。有刷直流电机在最初通电时,会有很大的浪涌电流或启动电流。随着电机速度不断提高,反电动势不断地增加,相应地,电流却不断减少。反电动势是电机产生的与端电压相反的电压。当电机停转时,电流将增加到等于端电压除以电机绕组电阻的水平。停转可能因机械故障或负载到达行程末端而发生。
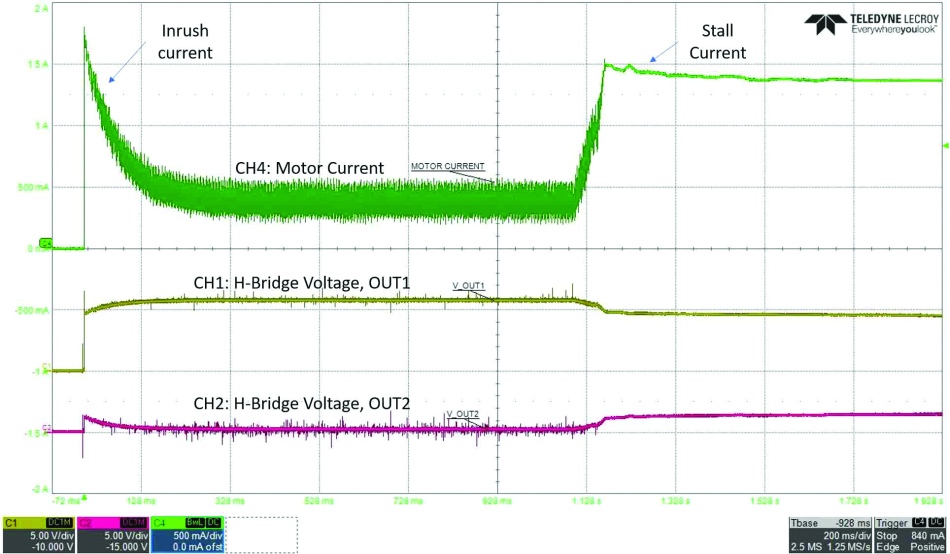
图1:以100%占空比驱动的有刷直流电机电流变化曲线。本文资料来源:TI
如果有刷直流电机在连接到驱动器时动作异常,请把电机与驱动电路的连接断开,改由台式电源为其直接供电。连接到电源后的电流曲线应如图1所示。如果电流曲线与图1不同,则电机可能存在问题。否则,再检查电机驱动器设置或MCU固件,以确保一切按预期运行。
有刷直流电机的电流调节方案
有时,导致异常行为的原因可能是驱动程序的功能配置错误。图2显示了由驱动器驱动的有刷直流电机的电流波形,其电流调节水平设置为限制浪涌电流和停转电流。虽然电流调节功能专门用于此目的,但如果电流调节水平设置得太低,电机可能无法产生足够的启动扭矩来转动电机。
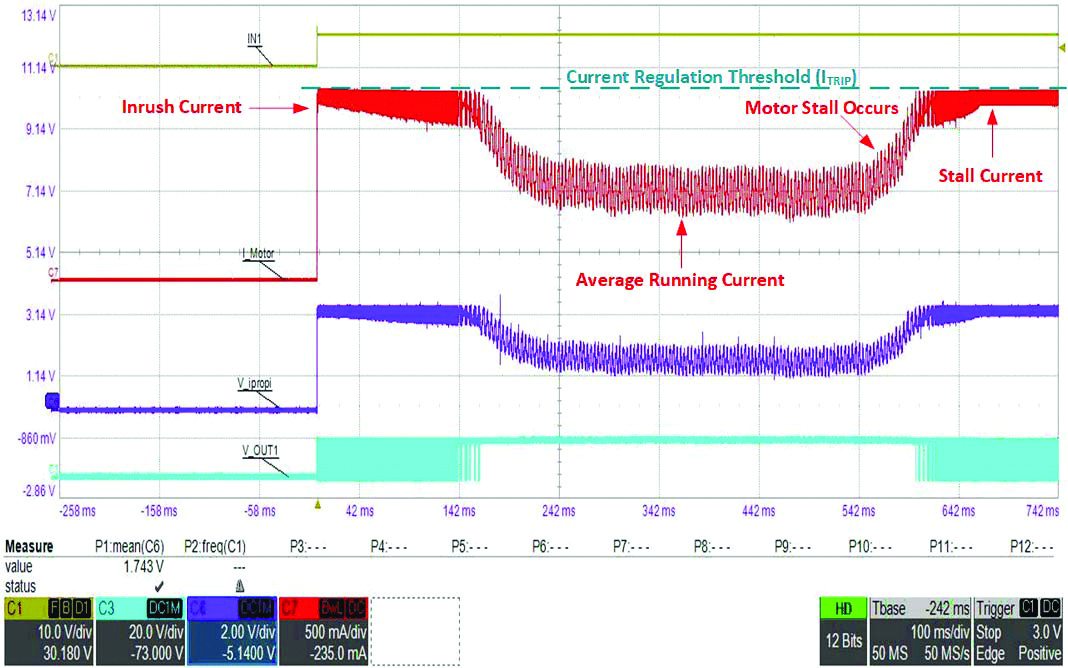
图2:由驱动器芯片驱动的有刷直流电机的电流波形。
有时候,电流调节方案与发送到电机驱动器输入端的脉宽调制(PWM)信号可能会相互影响。通常,电机驱动器会通过进入具有固定关闭时间的慢衰减状态,来提升电流调节响应的优先级,而不是遵循输入引脚的逻辑表。电流调节方案运作的详细说明都会包含在电机驱动器数据表中。
有刷直流电机PWM相关问题
图3显示了在PWM期间电流如何流过有刷直流电机驱动器中的全桥电路。一般来说,当PWM关断状态选用慢衰减时,系统将具有更好的性能。表1给出了DRV8251A驱动器芯片的驱动器逻辑表。为了用50%的PWM完成正向驱动,在导通期间将输入配置为IN1=1和IN2=0,在关断期间则将输入配置为IN1=1和IN2=1,这样可以在低侧FET中实现电流循环,并使电机在PWM关断期间保持其扭矩不变。
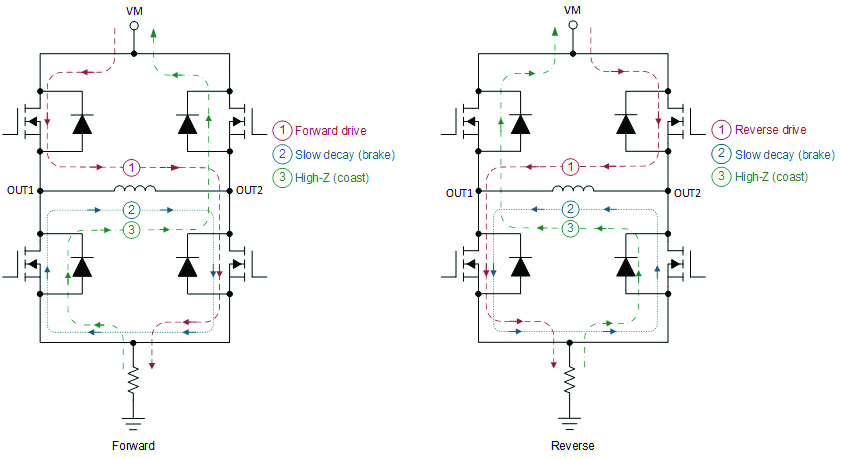
图3:电流流过H桥的工作原理。
| IN1 | IN2 | OUT1 | OUT2 | 描述 |
| 0 | 0 | 高阻 | 高阻 | 高阻,滑行,快衰减 |
| 0 | 1 | 低 | 高 | 反向驱动 |
| 1 | 0 | 高 | 低 | 正向驱动 |
| 1 | 1 | 低 | 低 | 制动,慢衰减 |
表1:DRV8251A驱动器芯片的PWM逻辑表。
如果在PWM关断期间IN1=0、IN2=0,则输出被禁止,电流通过FET体二极管快速流入电源轨并流入大容量电容器,此时为“快衰减”。对于低电感的电机而言,在PWM关断期间电流会很快降到0A,电机可能会失去扭矩。
在音圈或电流计等应用中,可能需要精确控制PWM占空比。对于这些应用,系统可能会受益于PWM关断期间电流的快衰减。为了更好地控制电流波形,关断时间也可以是快衰减和慢衰减的结合。
与使用PWM驱动有刷直流电机相关的另一个潜在问题是,PWM占空比突然减小。发生这种情况时,驱动器会像升压转换器一样,将电源轨上的电压泵送到全桥电路。图4显示了这种情况时的示例波形,这可能会导致电源轨上的电机驱动器和其他芯片损坏。电源泵送量取决于负载惯量和速度。通过逐渐减小PWM占空比,或保持电机处于慢衰减状态,直到转子完全停止,这样可以有效减少电源泵送量。
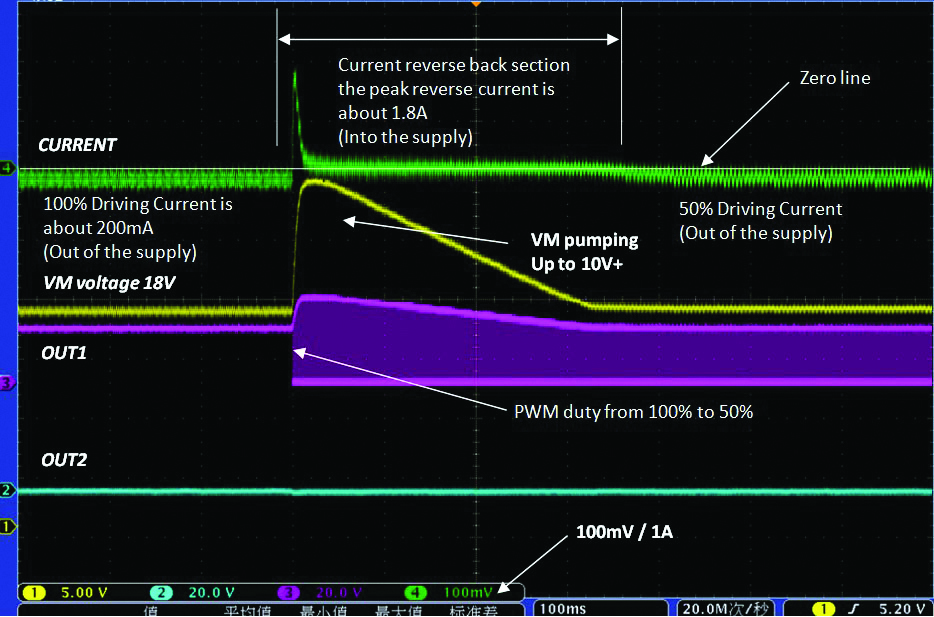
图4:当占空比从100%减小到50%时,电源轨电压将上升。
有刷直流电机端子上的电容
通常,会在有刷直流电机里内嵌电容器,以消除因电刷与换向器接触或断开时所引起的电磁噪声和瞬变。这些电容可以嵌入在转子上,连接在电机端子之间,或者从电机端子连接到电机外壳。另外,有些工程师还会在外部自行添加电容器。
图5所示为汽车车窗电机内的电容器。当该电机完全安装到位后,电容器引线与电机外壳将形成电接触。

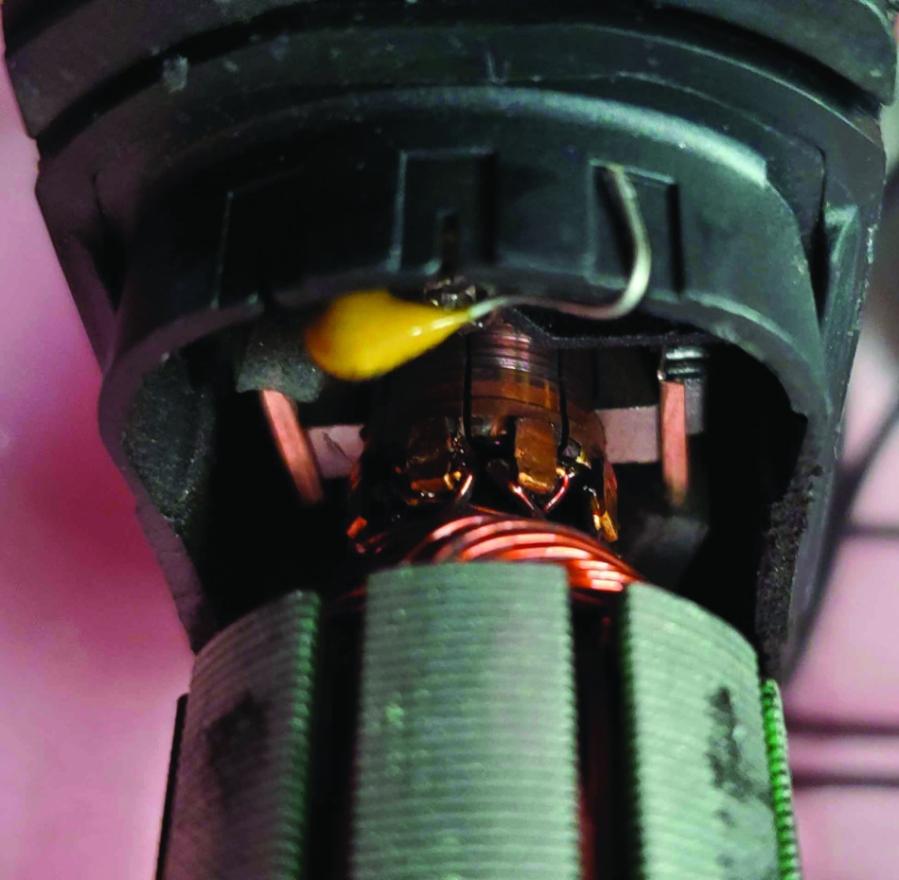
图5:车窗电机内嵌的电容器(上图)、电刷和换向器(下图)。
对于由电机驱动器控制的有刷直流电机来说,在每个PWM或电流调节周期内,电容将短暂吸收大电流。电容的电流-电压关系为:i=C×dv/dt,说明当电容电压在短时间内急剧变化时,它会吸收很大的电流。电容吸收如此大电流,可能会触发电机驱动器的过流保护,或电流调节功能跳闸,从而导致电机系统运行的不稳定。
解决方案包括:
·增加与电机串联的电感
·调整栅极驱动器中的漏源电压监测值,这是栅极驱动器中的过流保护功能
·选用不同的电机
·选用外部电容器时要确保容量合适
如果在外部增加电容器,通常电容<3nF。这时,浪涌瞬态持续时间会小于电机驱动器过流保护电路的去毛刺时间。许多集成有FET的电机驱动器具有模拟电流限流功能,从而可将这些瞬态的幅度保持在全桥FET的安全工作区域内。
栅极驱动器
电机驱动器可能集成有功率MOSFET,也可能为工程师提供栅极驱动信号来驱动外置的MOSFET。与集成有MOSFET的电机驱动器相比,在如何将栅极驱动和感应信号送到MOSFET方面,栅极驱动器会面临额外的设计挑战。更重要的是,寄生电感和电容引起的瞬变会影响EMI性能,并可能导致MOSFET或驱动器损坏。
栅极驱动信号是调试栅极驱动器时首先要检查的地方。图6和图7是正确的信号图形(摘自DRV8706-Q1栅极驱动器数据表)。
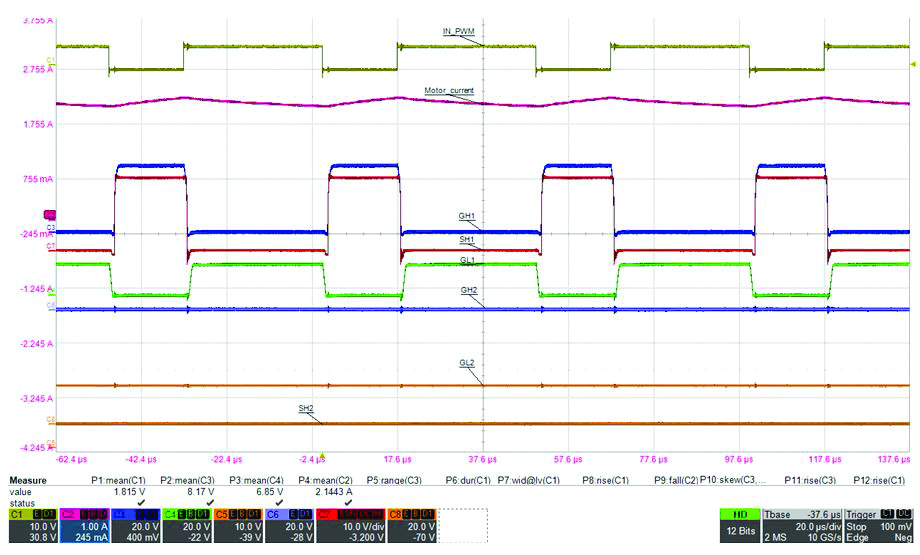
图6:PWM工作期间的栅极驱动信号。
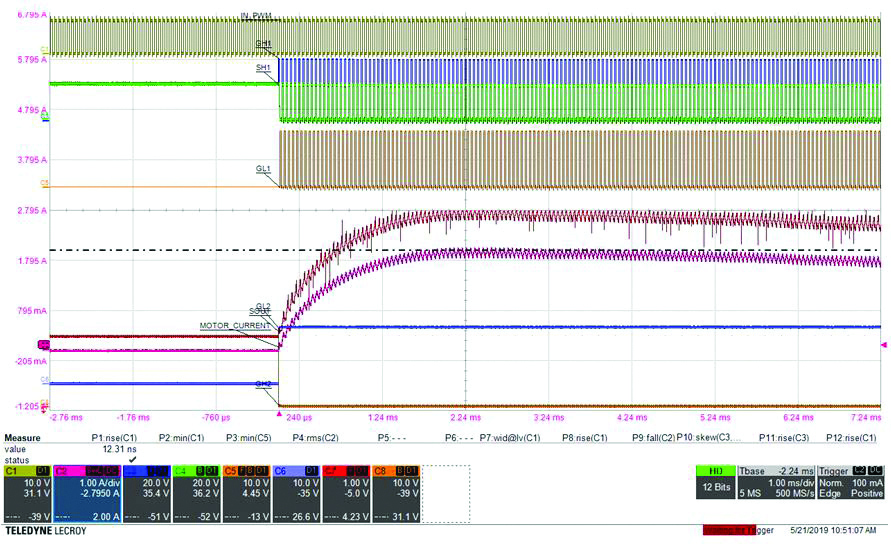
图7:电机启动期间的栅极驱动信号。
调试栅极驱动信号时,建议用探头在靠近引脚处进行测量。如果驱动器出现故障,请在靠近驱动器引脚的地方进行测量。为了获得最佳测量结果,请将探头地线连接到最近的驱动器GND引脚。如果MOSFET出现故障,请在靠近MOSFET引脚的地方进行测量。即尽量减小探头测量中的环路面积。
图8显示了用于减小环路面积的实用方法。使用带有长导线的鳄鱼夹探头接地时,瞬变可能会耦合到探头。地线的额外电感会给测量增加振铃(实际并不存在)。
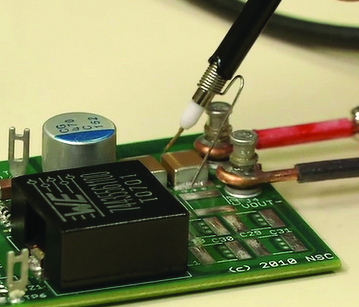
图8:一种实用的探头测量方法。
此外,可以考虑使用差分探头,直接测量MOSFET的栅源电压或栅漏电压。在调试高侧栅极驱动信号时,差分探头尤其有用。
如果栅极驱动器需要进一步调试,请探测电荷泵引脚。大多数栅极驱动器都有外部电荷泵引脚(VCP、CPH和CPL)连接到电容。电荷泵为高侧MOSFET提供栅极驱动电压。栅极驱动器会出现与电荷泵和栅极驱动信号相关的其他故障。
某些栅极驱动器(例如DRV8770),也会使用自举架构来提供高侧栅极驱动电压。在这种情况下,可以探测与自举电容相连的引脚。
电机行为的理解
拥有合适的台式测量设备,并深入了解电机行为,是调试有刷直流电机系统的重要起点。如果电机动作异常,请查看电机端子上的电压和电流。如果这些信号看起来很奇怪,请进一步检查电机驱动器的电源、输入信号和功能配置。另外,还要仔细检查台式测量设备,确保所用的电流限制措施和采样分辨率都合适无误。
(参考原文:Tips and tricks for testing, debugging brushed DC motors )
本文为《电子工程专辑》2022年8月刊杂志文章,版权所有,禁止转载。点击申请免费杂志订

