

最近,小米发布了四足机器人“铁蛋”(CyberDog),价格也比较亲民:9999元RMB,然而在购买方式上依然很“小米”:全球限量1000套,而且第一阶段只投放400台在小米社区公测,想要抢到估计很难。于是,笔者搜索了一下,发现铁蛋是基于MIT开源机器人开发而来,于是有了兴趣,能不能自己也“做”这样一个“活蹦乱跳”的机器人呢?成本是不是也只需要9999元?
概述
小米铁蛋
关于“铁蛋”的介绍就不过多赘述了。本文主要简要介绍MIT四足机器人开发框架及关键组成部分。
MIT Biomimetic Robotics Lab以MITCheetah3,MITCheetah2,MITCheetahMini闻名。

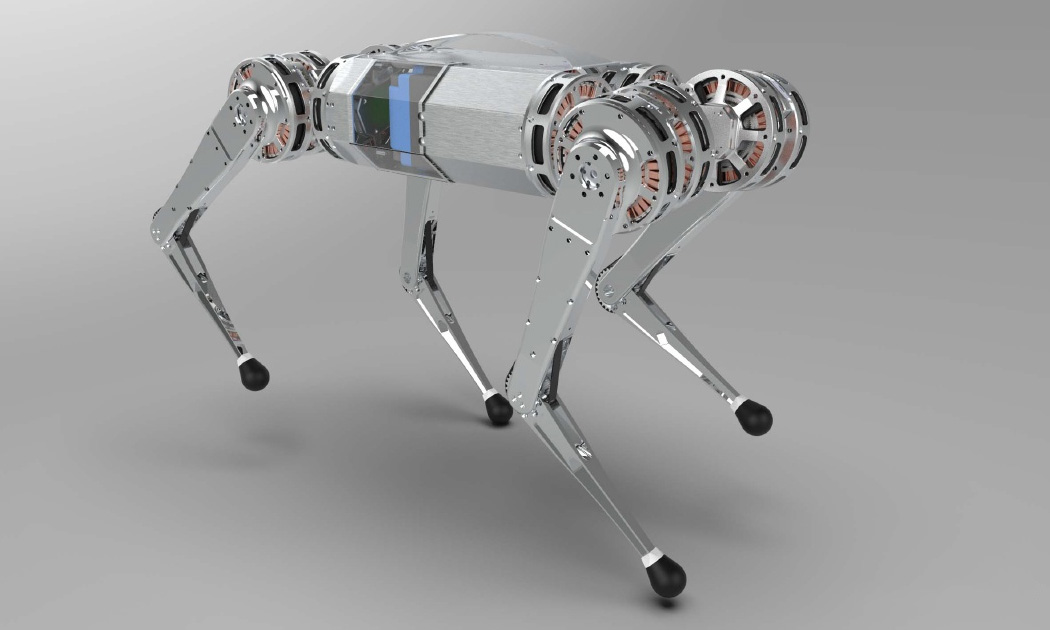
MIT’snewminicheetahrobot
2019年,实验室成员BenjaminKatz在他的硕士论文中开源了MITCheetahMini电机驱动器,连接12个电机与机载电脑的中心板(SPIne)的代码和硬件。(小米“铁蛋”应该也是在那个时候开始立项研发,它是基于MIT的CheetahMini框架来开发的)。
至此,世界上最先进的四足机器人之一:MITCheetahMini的所有软件,固件,除机器人自身外的硬件已经全部公开。
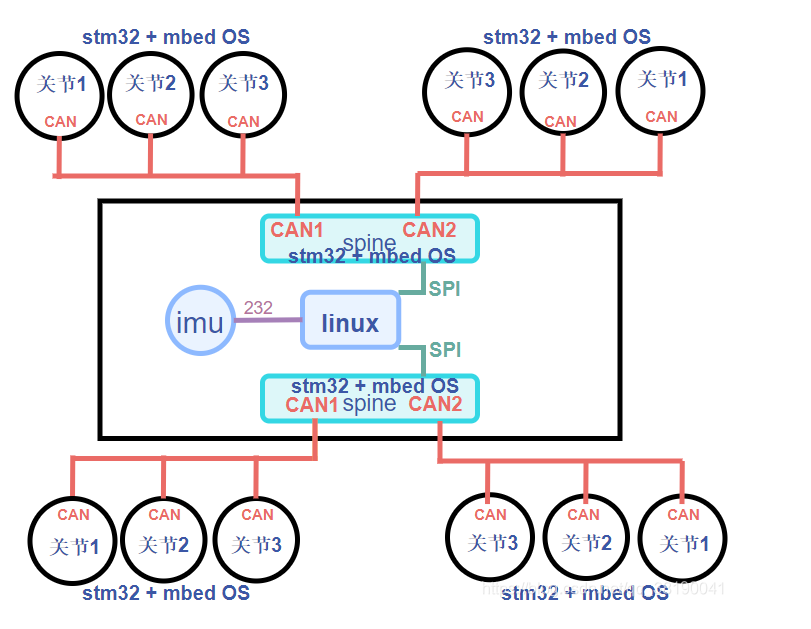
MITCheetamini的控制框架如下图,有12个关节通过12个电机来进行协同控制。
硬件
1、控制板:心脏
上面提到需要一个机载电脑的中心板,这个控制板可以用英伟达的JetsonXavierNXDeveloperKit。
根据官方介绍:JetsonXavierNX只有70毫米x45毫米,可以将NVIDIAXavierSoC的强大性能封装到JetsonNano™大小的模块中。这个外形小巧的模块将出色性能和功率优势与一组丰富的IO(从高速CSI和PCIe到低速I2C和GPIO)相结合。利用小巧的外形、传感器众多的接口和出色性能,为所有嵌入式AI系统和边缘系统带来新功能。
目前有预售,价格是3675元人民币。

这也是小米铁蛋采用的控制板,其实还有类似功能的控制板可以使用,只要能够满足MIT CheetahMini控制系统的要求即可。
2、足及关节

为了减少惯量,采用较为常规的驱动器上置(远离地面)排布,单腿自由度分配为传统的Roll-Pitch-Pitch形式。
3、关节电机



关节电机
这个也可以在某平台上找到,分为两种,带驱动的价格大约2200-2300元,不带驱动的价格是1450元左右(人民币)。套件里面包含电机,减速器和CAN驱动器(带驱动版本)。
并且,目前还支持颜色、减速比、安装孔位等的定做,可DIY性较强。有了控制板心脏,足,以及关节电机以后,整个四足机器人就只差一个躯壳了,躯壳也可以购买或者自己DIY。
至此,硬件部分就准备就绪,只剩下软件和通信的调试了。
软件与通信
软件方面主要是利用控制板控制12个关节电机的行为。12个关节驱动器,只运行了FOC的算法,对于命令和信息上报使用了CAN通信。下面是概述部分的系统框图:
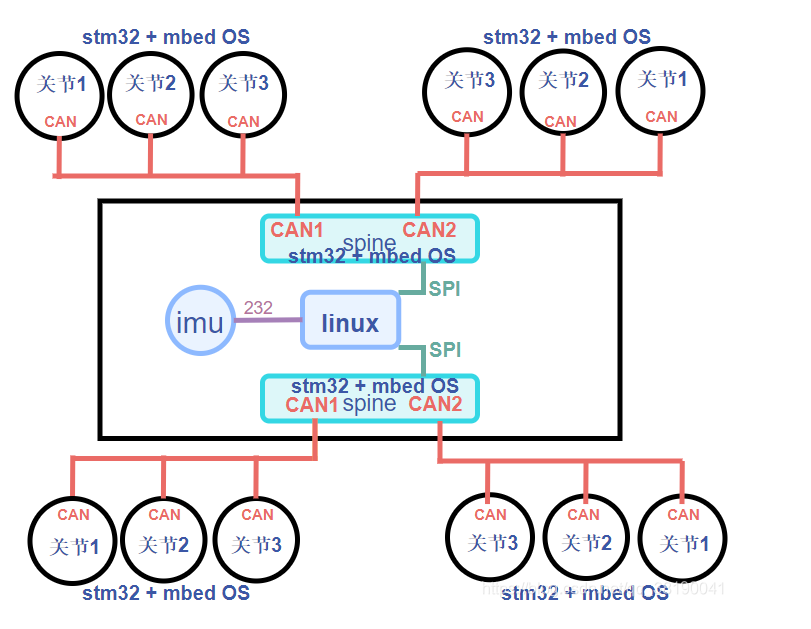
一条腿(三个关节)为一路CAN,与SPIne进行通信,一个SPIne模块负责两条腿的CAN通信,并使用SPI和电脑信息交换。
IMU用的是串口通信。每个STM32还有独立串口通信,用于模块的设置与debug。
模块通信速率:
每路CAN的通信配置是1M。SPIne用两个STM32是因为带宽不够,每个STM32有两路CAN,每一路负责三个电机的通讯才达到1000Hz,若一路负责两条腿六个电机,就达不到。
SPIne和电脑SPI通信的时钟为12M,通信频率为1000hz。
详细的软件与通信请联系我们或者作者(微信同名)加入论坛。
组装成本,真的只需9999吗?
从上面看,自己组装一个四足机器人的最低成本大约是:3675+1450*4+leg*4≈9999。如果要有现成的驱动,则要贵上800*4=3200。
真的只需要9999吗?说小米亏本卖铁蛋是在撒谎吗?
NO!
注意每条腿需要三个关节电机,那么成本是:3675+1450*12+leg*4≈22000。(有软件开发功底,就不需要驱动成本800/个)。
但是,
笔者与朋友老刘沟通了,可以一次购买较多数量的电机,也就是说的批量采购,或者说团购,电机价格会低很多。
以小米1000套,那就需要1.2万个电机(其实小米不止采购1.2万个,一是需要备用和维修,二是技术成熟后会计划第二批推出,估计采购了数万甚至十来万),
经与厂家当面沟通,批量/团购购买的电机价格基本能够以出厂价算,大概就是400多,而小米数万甚至数十万的采购,价格还能降低。
这样算下来,DIY一个自己的“铁蛋”,确实只需要9999元人民币左右。
因此,如果有人说小米是在亏成本卖铁蛋,要么就是不了解行情,要么就是在撒谎。不过,这是原材料成本,不包含研发成本。
小结
当然,DIY一个四足机器人可以更深入,譬如结合现在的各种开放的语音控制平台:百度、讯飞等等,就能听你使唤了。
在8月份小米发布“铁蛋”机器人的时候,小米集团副总裁常程表示,CyberDog目前还处在工程探索阶段,目前正在做的是保证设备的稳定性以及基础功能的体验。9月11日,小米集团副总裁崔宝秋称,小米不仅会筹建机器人实验室,还将设立“机器人开源社区”,通过技术回馈促进机器人领域共同进步。小米此举一方面能够促进人形机器人的开发和发展,另一方面也是对国内机器人人才的一个大赶集。
更多更深的讨论,请联系我们或作者(微信同名)。
感谢:老刘
参考:
MIT开源资料
电机控制器硬件:https://github.com/bgkatz/3phase_integrated
电机控制器软件:https://os.mbed.com/users/benkatz/code/Hobbyking_Cheetah_Compact_DRV8323/
SPIne硬件:https://github.com/bgkatz/SPIne
SPIne软件:https://os.mbed.com/users/benkatz/code/SPIne/
linux控制代码CheetahMini:https://github.com/mit-biomimetics/Cheetah-Software
责编:Luffy Liu

